 |
Introduction to the ISA of the FALCON-A and Examples |
| << Thinking Process for ISA Design |
| Behavioral Register Transfer Language for FALCON-A, The EAGLE >> |
Advanced Computer
Architecture-CS501
Computer
Architecture
Lecture
No. 8
Reading
Material
Handouts
Slides
Summary
1) Introduction to
the ISA of the FALCON-A
2) Examples
for the FALCON-A
Introduction
to the ISA of the
FALCON-A
We take a
look at the notation that we
are going to employ when
studying the FALCON-
A. We will
refer to the contents of a
register by enclosing in square brackets
the name of
the
register, for instance, R
[3] refers to the contents
of the register 3. Memory
contents
are to be
referred to in a similar fashion;
for instance, M [8] refers
to the contents of
memory at
location 8 (or the 8th
memory
cell).
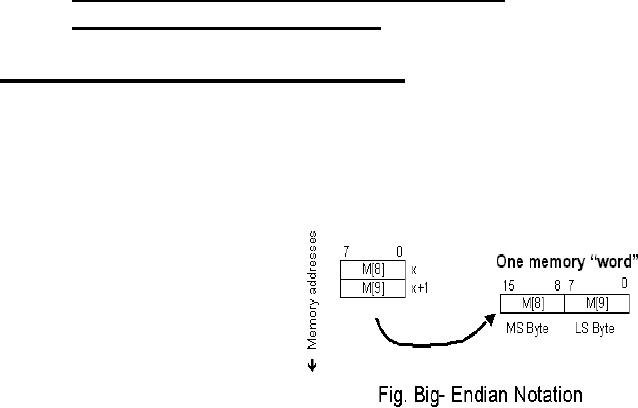
Since
memory is organized into
cells
of 1
byte, whereas the memory
word
size is 2
bytes, two adjacent
memory
cells
together make up a memory
word.
So, memory word at
the
memory
address 8 would be
defined
as 1 byte
at address 8 and 1 byte at
address
9. To refer to 16-bit
memory
words, we
make use of a special
notation,
the concatenation of two
memory locations. Therefore, to
refer to the 16-bit
memory
word at location 8, we would
write M[8]�M[9]. As we employ
the big-endian
format,
M
[8]<15...0>:=M[8]�M[9]
So in our
notation is used to represent
concatenation.
Little
endian puts the smallest
numbered byte at the
least-significant position in a
word,
whereas in
big endian, we place the
largest numbered byte at the
most significant
position.
Note that in our case, we
use the big-endian
convention of ordering
bytes.
However,
within each byte itself,
the ordering of the bits is
little endian.
FALCON-A
Features
The
FALCON-A processor has
fixed-length instructions, each 16
bits (2 bytes) long.
Addressing
modes supported are limited,
and memory is accessed through
the load/store
instructions
only.
Page
91
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
FALCON-A
Instruction Formats
Three
categories of instructions are
going to be supported by the
FALCON-A processor;
arithmetic,
control, and data transfer
instructions. Arithmetic instructions
enable
mathematical
computations. Control instructions
help change the flow of the
program as
and when
required. Data transfer operations
move data between the
processor and
memory.
The arithmetic category also
includes the logical
instructions. Four
different
types of
instruction formats are used
to specify these instructions. A
brief overview of the
various
fields in these instructions
formats follows.
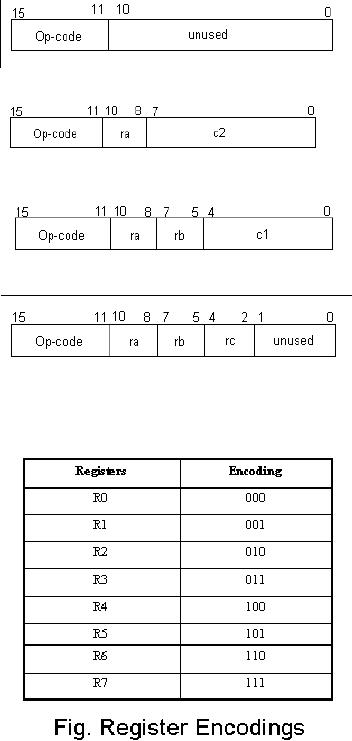
Type
I instruction format is
shown in
the
given figure. In it, 5 bits
are
reserved
for the op-code (bits
11
through
15). The rest of the bits
are
unused in
this instruction
type,
which
means they are
not
considered.
Type
II instruction shown in
the
given
figure, has a 5-bit
op-code
field, a
3-bit register field, and an
8-bit
constant
(or immediate operand)
field.
Type
III instructions contain
the 5-bit
op-code
field, two 3-bit register
fields
for
source and destination registers,
and an
immediate operand field of
length 5
bits.
Type
IV instructions contain
the op-
code
field, two 3-bit register
fields, a
constant
filed on length 3 bits as
well
as two
unused bits. This format is
shown in
the
given figure.
Encoding
of registers
We have a
register file comprising
of
eight
general-purpose registers in the
CPU. To
encode these registers in
the
binary,
so they can be referred to in
various
instructions, we require log2(8)
= 3 bits.
Therefore, we have
already
allocated
three bits per register in
the
instructions,
as seen in the
various
instruction
formats. The encoding
of
registers in
the binary format is
shown
in the
given table.
It is
important to note here that
the
register
R0 has special usage in
some
cases.
For instance, in load/
store
operations,
if register R0 is used as a
second
operand, its value is considered to be
zero. R0 has special usage in
the multiply
and
divide (mul & div)
instructions as well.
Page
92
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
Instructions
and instruction formats
We return
to our discussion of instruction
formats in this section. We will
now classify
which
instructions belong to what
instruction format
types.
Type
I
Five of
the instructions included in
the instruction set of
FALCON-A belong to type
I
instruction
format. These are
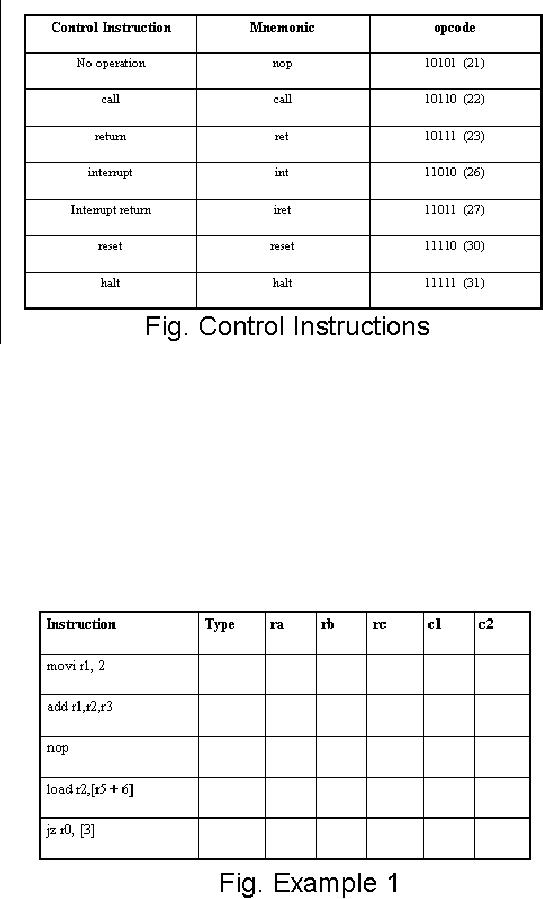
1. nop
(op-code = 21)
This
instruction is to instruct the
processor to `do nothing',
or, in other words,
do
`no
operation'. This instruction is
generally useful in pipelining. We will
study
pipelining
later in the course.
2. reset
(op-code = 30)
3. halt
(op-code=31)
4.
int
(opcode=
26)
5.
iret
(op-code=
27)
All of
these instructions take no operands,
therefore, besides the 5
bits used for the
op-
code,
the rest of the bits are
unused.
Type
II
There
are nine FALCON-A
instructions that belong to
this type. These are listed
below.
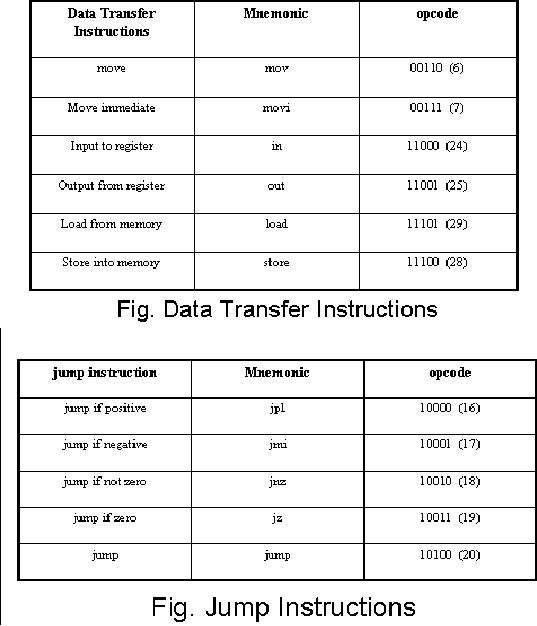
1. movi
(op-code = 7 )
The
movi instruction loads a register
with the constant (or
the immediate value)
specified
as the second operand. An example
is
movi
R3, 56
R[3]
←
56
This
means that the register R3
will have the value 56 stored in it as
this instruction
is
executed.
2. in
(op-code = 24)
This
instruction is to load the
specified register from
input device. An
example
and its
interpretation in register transfer
language are
in R3,
57
R [3]
←
IO
[57]
3. out
(op-code = 25)
The
`out' instruction will move
data from the register to
the output device
specified
in the instruction, as the
example demonstrates:
out
R7, 34
IO [34]
←
R
[7]
4. ret
(op-code=23)
This
instruction is to return control
from a subroutine. This is done
using a
register,
where the return address is
stored. As shown in the example, to
return
control,
the program counter is
assigned the contents of the
register.
ret
R3
PC ← R
[3]
5. jz
(op-code= 19)
When
this instruction is executed,
the value of the register
specified in the field
ra
is checked, and if it
is equal to zero, the
Program Counter is advanced by
the
jump(value)
specified in the
instruction.
jz r3,
[4]
(R[3]=0):
PC←
PC+
4;
In this
example, register r3's value
is checked, and if found to be zero, PC
is
advanced by
4.
6. jnz
(op-code= 18) This
instruction is the reverse of the jz
instruction, i.e.,
the
jump
(or the branch) is taken, if
the contents of the register
specified are not
equal
to
zero.
Page
93
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
jnz
r4, [variable]
(R[4]≠0):
PC←
PC+
variable;
7. jpl
(op-code= 16) In this
instruction, the value
contained in the register
specified
in the
field ra is checked, and if it is positive,
the jump is taken.
jpl
r3, [label]
(R[3]≥0): PC
←
PC+
(label-PC);
8. jmi
(op-code= 17) In this case,
PC is advanced (jump/branch is taken) if
the
register
value is negative
jmi
r7, [address]
(R[7]<0):
PC←
PC+
address;
Note
that, in all the
instructions for jump, the
jump can be specified by a constant,
a
variable,
a label or an address (that
holds the value by which
the PC is to be advanced).
A
variable can be defined through
the use of the `.equ'
directive. An address (of data)
can
be
specified using the
directive `.db' or `.dw'. A
label can be specified with
any
instruction.
In its usage, we follow the
label by a colon `:' before
the instruction
itself.
For
example, the following is an
instruction that has a label
`alfa' attached to it
alfa:
movi r3 r4
Labels
implement relative jumps, 128
locations backwards or 127 locations
forward
(relative
to the current position of
program control, i.e. the
value in the program
counter).
The
compiler handles the
interpretation of the field c2 as a
constant/ variable/
label/
address.
The machine code just
contains an 8-bit constant
that is added to the
program
counter
at run-time.
9. jump
(op-code= 20)
This
instruction instructs the
processor to advance the program
counter by the
displacement
specified, unconditionally (an
unconditional jump). The
assembler
allows
the displacement (or the
jump) to be specified in any of
the following ways
jump
[ra + constant]
jump
[ra + variable]
jump
[ra + address]
jump
[ra + label]
The
types of unconditional jumps
that are possible are
� Direct
� Indirect
� PC
relative (a `near'
jump)
� Register
relative (a `far'
jump)
The c2
field may be a constant,
variable, an address or a
label.
A direct
jump is specified by a
PC-label.
An
indirect jump is implemented by
using the C2 field as a
variable.
In all of
the above instructions, if the
value of the register ra is
zero, then the
Program
Counter
is incremented (or decremented) by the
sign-extended value of the
constant
specified
in the instruction. This is
called the PC-relative jump,
or the `near' jump. It
is
denoted in RTL
as:
(ra=0):PC← PC+(8αC2<7>)�C2<7..0>;
If the
register ra field is non-zero,
then the Program Counter is
assigned the sum of
the
sign-extended
constant and the value of
register specified in the
field ra. This is known
as
the
register-relative, or the `far'
jump. In RTL, this is denoted
as:
(ra≠0):PC← R[ra]+(8αC2<7>)�C2<7..0>;
Page
94
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
Note
that C2 is computed by sign
extending the constant,
variable, address, or (label
PC).
Since we have 8 bits available
for the C2 field (which can
be a constant, variable,
address
or a PC-label), the range for
the field is -128 to + 127.
Also note that the
compiler
does
not allow an instruction
with a negative sign before
the register name, such as
`jump
[-r2]'.
If the C2 field is being
used as an address, it should
always be an even value
for
the
jump instruction. This is
because our instruction word
size is 16 bits, whereas in
instruction
memory, the instruction
memory cells are of 8 bits
each. Two consecutive
cells
together make an instruction.
Type
III
There
are nine instructions of the
FALCON-A that belong to Type
III. These are:
1. andi
(op-code = 9)
The
andi instruction bit-wise
`ands' the constant
specified in the instruction
with
the
value stored in the register
specified in the second operand
register and stores
the
result in the destination
register. An example
is:
andi
r4, r3, 5
This
instruction will bit-wise and the
constant 5 and R[3], and assign
the value
thus
obtained to the register
R[4], as given .
R [4]
←
R
[3] & 5
2. addi
(op-code = 1)
This
instruction is to add a constant
value to a register; the
result is stored in a
destination
register. An example:
addi r4,
r3,4 R [4] ← R [3] +
4
3. subi
(op-code = 3)
The
subi instruction will subtract
the specified constant from
the value stored in a
source
register, and store to the destination
register. An example
follows.
subi
r5, r7, 9 R [5] ← R [7]
9
4.
ori
(op-code=
11)
Similar
to the andi instruction, the
ori instruction bit-wise
`ors' a constant with
a
value
stored in the source register, and
assigns it to the destination
register. The
following
instruction is an example.
ori
r4, r7, 3 R[4] ← R[7] ~
3
5. shiftl
(op-code = 12)
This
instruction shifts the value
stored in the source register (which is
the second
operand),
and shifts the bits left as
many times as is specified by
the third
operand,
the constant value. For
instance, in the
instruction
shiftl
r4, r3, 7
The
contents of the register are
shifted left 7 times, and
the resulting number
is
assigned
to the register r4.
6. shiftr
(op-code = 13)
This
instruction shifts to the
right the value stored in a
register. An example
is:
shiftr
r4, r3,9
7.
asr
(op-code
=
15)
An
arithmetic shift right is an
operation that shifts a signed
binary number
stored in
the source register (which is
specified by the second
operand), to the
right,
while leaving the sign-bit
unchanged. A single shift
has the effect of
dividing
the number by 2. As the
number is shifted as many
times as is specified
in the
instruction through the
constant value, the binary
number of the source
register
gets divided by the constant
value times 2. An example
is
Page
95
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
asr
r1, r2, 5
This
instruction, when executed, will
divide the value stored in r2 by
10, and
assign
the result to the register
r1.
8. load
(op-code= 29)
This
instruction is to load a register
from the memory. For
instance, the
instruction
load
r1, [r4 +15]
will add
the constant 15 to the value
stored in the register r4,
access the memory
location
that corresponds to the number
thus resulting, and assign
the memory
contents
of this location to the
register r1; this is denoted in RTL
by:
R[1]
←
M[R[4]+15]
9. store
(op-code= 28)
This
instruction is to store a value in the
register to a particular memory
location.
In the
example:
store r6,
[r7+13]
The
contents of the register r6
are being stored to the
memory location that
corresponds to
the sum of the constant 13
and the value stored in the
register r7.
M[R[7]+13]
←
R[6]
Type
III Modified
There
are 3 instructions in the
modified form of the Type
III instructions. In the
modified
Type III
instructions, the field c1 is
unused.
1. mov
(op-code = 6 )
This
instruction will move (copy)
data of a source register to a
destination
register.
For instance, in the
following example, the
contents of the register r3
are
copied to
the register r4.
mov
r4, r3
In RTL,
this can be represented as
R[4]
←
R[3]
2.
not
(op-code
= 14 )
This
instruction inverts the
contents of the source register, and
assigns the value
thus
obtained to the destination
register. In the following
example, the contents
of
register
r2 are inverted and assigned to
register r4.
not
r4, r2
In
RTL:
R[4]
←
!R[2]
3. call
(op-code
= 22 )
Procedure
calls are often encountered
in programming languages. To add
support
for
procedure (or subroutine)
calls, the instruction call
is used. This
instruction
first
stores the return address in
a register and then assigns
the Program Counter a
new
value (that specifies the
address of the subroutine).
Following is an example
of the
call instruction
call
r4, r3
This
instruction saves the
current contents (the return
address) of the
Program
Counter
into the register r4 and
assigns the new value to
the PC from register
r3.
R[4]
←
PC, PC
←
R[3]
Type
IV
Six
instructions belong to the
instruction format Type IV. These
are
Page
96
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
1.
add
(op-code
= 0 )
This
instruction adds contents of a
register to those of another register,
and
assigns
to the destination register. An
example:
and r4,
r3, r5
R[4]
←
R[3]
+R[5]
2.
sub
(op-code
= 2 )
This
instruction subtracts value of a
register from another the
value stored in
another
register, and assigns to the
destination register. For
example,
sub r4,
r3, r5
In RTL,
this is denoted by
R[4]
←
R[3]
R[5]
3. mul
(op-code = 4 )
The
multiply instruction will store the
product of two register
values, and stores in
the
destination register. An example
is
mul
r5, r7, r1
The RTL
notation for this
instruction will be
R[0]
R[5] ← R[7]*R[1]
4.
div
(op-code=
5)
This
instruction will divide the
value of the register that
is the second operand, by
the
number in
the register specified by
the third operand, and assign
the result to the
destination
register.
div
r4, r7, r2 R[4]←R[0]
�R[7]/R[2],R[0]←R[0]
�R[7]%R[2]
5.
and
(op-code=
8)
This
`and' instruction will obtain a
bit-wise `and' of the values
of two registers and
assigns
it to a destination register. For
instance, in the following
example, contents of
register
r4 and r5 are bit-wise `anded' and
the result is assigned to
the register r1.
and r1,
r4, r5
In RTL we
may write this as
R[1]
←
R[4]
& R[5]
6.
or
(op-code=
10)
To
bit-wise `or' the contents
of two registers, this instruction is
used. For instance,
or r6,
r7,r2
In RTL
this is denoted as
R[6]
←
R[7] ~
R[2]
FALCON-A:
Instruction Set
Summary
We have
looked at the various types
of instruction formats for
the FALCON-A, as well
as
the
instructions that belong to
each of these instruction
format types. In this
section, we
have
simply listed the
instructions on the basis of
their functional groups;
this means that
the
instructions that perform
similar class of operations
have been listed
together.
Page
97
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
Page
98
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
Examples
for FALCON-A
In this
section we take up a few sample problems
related to the FALCON-A
processor.
This will
enhance our understanding of the
FALCON-A processor, as well as of
the
general
concepts related to general processors
and their instruction set
architectures. The
problems
we will look at include
1.
Identification of the instruction
types and operands
2.
Addressing modes and RTL
description
3. Branch
condition and status of the PC
4. Binary
encoding for
instructions
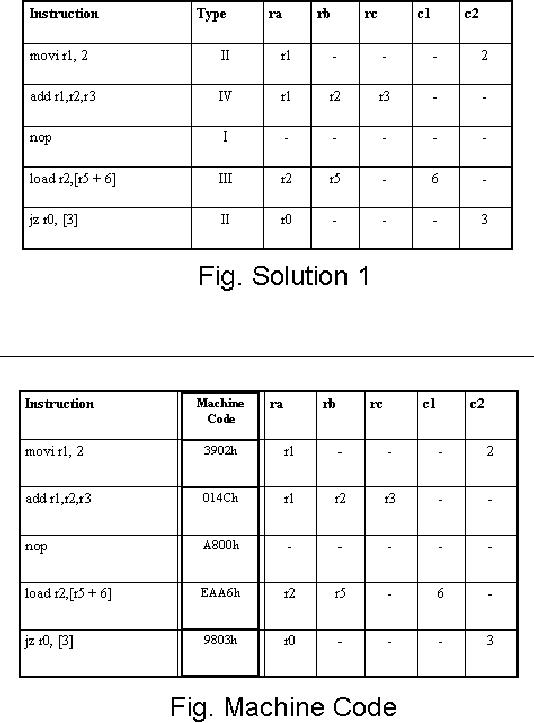
Example
1:
Identify
the types of given FALCON-A
instructions and specify the
values in the fields
Solution
The
solution to this problem is
quite straightforward. The
types of these instructions,
as
well as
the fields, have already
been discussed in the
preceding sections.
Page
99
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
We can also
find the machine code
for these instructions. The
machine code (in
the
hexadecimal
representation) is given for
these instructions in the
given table.
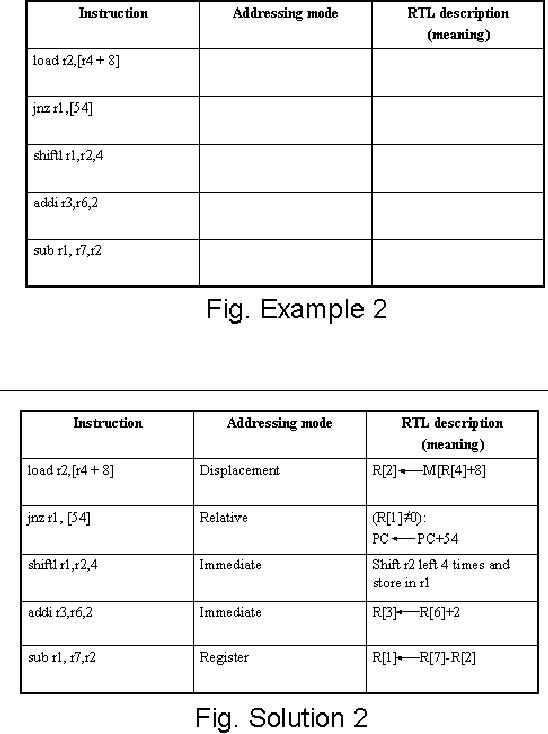
Example
2:
Identify
the addressing modes and
Register Transfer Language
(RTL) description
(meaning)
for the given FALCON-A
instructions
Page
100
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
Solution
Addressing
modes relate to the way
architectures specify the
address of the objects
they
access.
These objects may be constants and
registers, in addition to memory
locations.
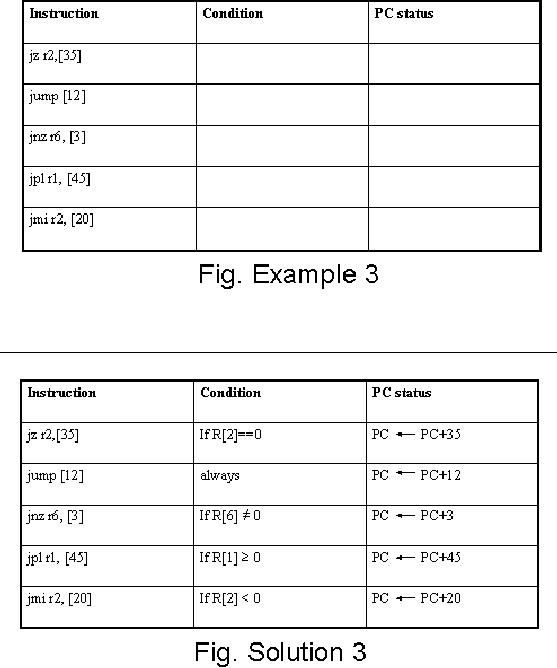
Example
3:
Specify the condition for
the branch instruction and
the status of the PC
after
the
branch instruction executes with a
true branch condition
Page
101
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
Solution
We have
looked at the various jump
instructions in our study of
the FALCON-A. Using
that
knowledge, this problem can be
solved easily.
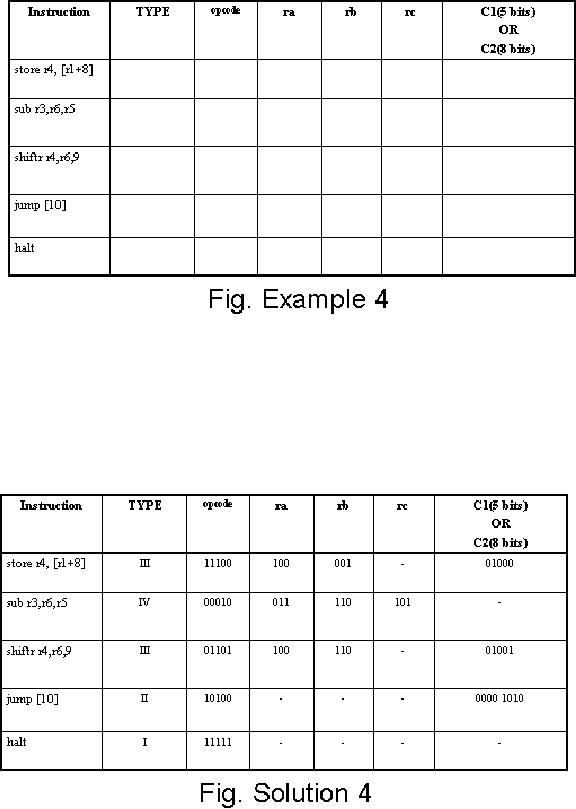
Example
4:
Specify the binary encoding
of the different fields in
the given FALCON-A
instructions.
Page
102
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
Solution
We can
solve this problem by
referring back to our discussion of
the instruction
format
types.
The op-codes for each of
the instructions can also be looked up
from the tables. ra,
rb and rc
(where applicable) registers'
values are obtained from
the register encoding
table we
looked at. The constants C1
and C2 are there in instruction
type III and II
respectively.
The immediate constant
specified in the instruction can also be
simply
converted
to binary, as shown.
Page
103
Last
Modified: 01-Nov-06
Table of Contents:
- Computer Architecture, Organization and Design
- Foundations of Computer Architecture, RISC and CISC
- Measures of Performance SRC Features and Instruction Formats
- ISA, Instruction Formats, Coding and Hand Assembly
- Reverse Assembly, SRC in the form of RTL
- RTL to Describe the SRC, Register Transfer using Digital Logic Circuits
- Thinking Process for ISA Design
- Introduction to the ISA of the FALCON-A and Examples
- Behavioral Register Transfer Language for FALCON-A, The EAGLE
- The FALCON-E, Instruction Set Architecture Comparison
- CISC microprocessor:The Motorola MC68000, RISC Architecture:The SPARC
- Design Process, Uni-Bus implementation for the SRC, Structural RTL for the SRC instructions
- Structural RTL Description of the SRC and FALCON-A
- External FALCON-A CPU Interface
- Logic Design for the Uni-bus SRC, Control Signals Generation in SRC
- Control Unit, 2-Bus Implementation of the SRC Data Path
- 3-bus implementation for the SRC, Machine Exceptions, Reset
- SRC Exception Processing Mechanism, Pipelining, Pipeline Design
- Adapting SRC instructions for Pipelined, Control Signals
- SRC, RTL, Data Dependence Distance, Forwarding, Compiler Solution to Hazards
- Data Forwarding Hardware, Superscalar, VLIW Architecture
- Microprogramming, General Microcoded Controller, Horizontal and Vertical Schemes
- I/O Subsystems, Components, Memory Mapped vs Isolated, Serial and Parallel Transfers
- Designing Parallel Input Output Ports, SAD, NUXI, Address Decoder , Delay Interval
- Designing a Parallel Input Port, Memory Mapped Input Output Ports, wrap around, Data Bus Multiplexing
- Programmed Input Output for FALCON-A and SRC
- Programmed Input Output Driver for SRC, Input Output
- Comparison of Interrupt driven Input Output and Polling
- Preparing source files for FALSIM, FALCON-A assembly language techniques
- Nested Interrupts, Interrupt Mask, DMA
- Direct Memory Access - DMA
- Semiconductor Memory vs Hard Disk, Mechanical Delays and Flash Memory
- Hard Drive Technologies
- Arithmetic Logic Shift Unit - ALSU, Radix Conversion, Fixed Point Numbers
- Overflow, Implementations of the adder, Unsigned and Signed Multiplication
- NxN Crossbar Design for Barrel Rotator, IEEE Floating-Point, Addition, Subtraction, Multiplication, Division
- CPU to Memory Interface, Static RAM, One two Dimensional Memory Cells, Matrix and Tree Decoders
- Memory Modules, Read Only Memory, ROM, Cache
- Cache Organization and Functions, Cache Controller Logic, Cache Strategies
- Virtual Memory Organization
- DRAM, Pipelining, Pre-charging and Parallelism, Hit Rate and Miss Rate, Access Time, Cache
- Performance of I/O Subsystems, Server Utilization, Asynchronous I/O and operating system
- Difference between distributed computing and computer networks
- Physical Media, Shared Medium, Switched Medium, Network Topologies, Seven-layer OSI Model