 |
Direct Memory Access - DMA |
| << Nested Interrupts, Interrupt Mask, DMA |
| Semiconductor Memory vs Hard Disk, Mechanical Delays and Flash Memory >> |
Advanced Computer
Architecture-CS501
________________________________________________________
Advanced
Computer Architecture
Lecture
No. 31
Reading
Material
Vincent
P. Heuring & Harry F. Jordan
Chapter
8
Computer
Systems Design and Architecture
8.4
Summary
·
Direct
Memory Access (DMA):
Direct
Memory Access
(DMA):
Introduction
Direct
Memory Access is a technique
which allows a peripheral to
read from and/or
write
to memory
without intervention by the
CPU. It is a simple form of bus
mastering where
the I/O
device is set up by the CPU
to transfer one or more contiguous
blocks of memory.
After
the transfer is complete,
the I/O device gives control
back to the CPU.
The
following DMA transfer combinations
are possible:
· Memory
to memory
· Memory
to peripheral
· Peripheral
to memory
· Peripheral
to peripheral
The DMA
approach is to "turn off" (i.e.,
tri-state and electrically disconnect
from the
system
buses) the CPU and let a
peripheral device (or memory
- another module or
another
block of the same module)
communicate directly with
the memory (or
another
peripheral).
ADVANTAGE:
Higher transfer rates
(approaching that of the
memory) can be achieved.
DISADVANTAGE:
A DMA Controller, or a DMAC, is needed,
making the system
complex
and expensive.
Generally,
DMA requests have priority
over all other bus
activities, including
interrupts.
No
interrupts may be recognized
during a DMA cycle.
Reason
for DMA:
The
instruction load
[2], [9] is
illegal. The symbols [2] and
[9] represent memory
locations.
This transfer has to be done in
two steps:
· load
r1,[9]
· store
r1,bx
Thus, it
is not possible to transfer from one
memory location to another
without involving
the
CPU. The same applies to
transfer between memory and
peripherals connected to I/O
ports.
e.g., we cannot have out
[6], datap. It has to
be done in two steps:
Page
315
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
________________________________________________________
· load
r1,[6]
· out
r1, datap
Similar
comments apply to the in instruction.
Thus,
the real cause of the
limited transfer rate is the CPU itself.
It acts as an
unnecessary
"middleman". The above discussion
also implies that, in general,
every
data
word travels over the
system bus twice.
Some
Definitions:
MASTER
COMPONENT: A
component connected to the
system bus and
·
having
control of it during a particular bus
cycle.
SLAVE
COMPONENT: A
component connected to the
system bus and with
·
which
the master component can communicate
during a particular bus
cycle.
Normally
the CPU with its bus
control logic is the master
component.
QUALIFICATIONS
TO BECOME A MASTER: A Master
must have the
·
capability
to place addresses on the address bus and
direct the bus activity
during
a bus
cycle.
QUALIFIED
COMPONENTS:
·
o Processors
with their associated bus
control logic.
o DMA
controllers.
CYCLE
STEALING: Taking
control of the system bus
for a few bus cycles.
·
Data
Transfer using DMA:
Data
transfer using DMA takes place in
three steps.
1st Step:
in this
step when the processor
has to transfer data it
issues a command to the
DMA
controller
with the following
information:
Operation
to be performed i.e., read or
write operation.
Address of I/O
device.
Address of
memory block.
Size of
data to be transferred.
After
this, the processor becomes
free and it may be able to perform
other tasks.
2nd Step:
In this
step the entire block of
data is transferred directly to or
from memory by the
DMA
controller.
3rd Step:
In this,
at the end of the transfer, the DMA
controller informs the processor by sending an
interrupt
signal.
See
figure 8.18 on the page
number 400 of text
book.
The
DMA Transfer Protocol:
Most
processors have a separate
line over which an external
device can send a request
for DMA.
There are various names in
use for such a line.
HOLD, RQ, or Bus
Request
(BR),
etc. are examples of these
names.
Page
316
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
________________________________________________________
The DMA
cycle usually begins with
the alternate bus master requesting
the system bus
by
activating the associated
Bus Request line and, of course,
satisfying the setup and
hold
times.
The CPU completes the
current bus cycle, in the
same way as it does in case
of
interrupts,
and responds by floating the
address, data and control
lines. A Bus Grant
pulse is
then output by the CPU to
the same device from
where the request
occurred.
After
receiving the Bus Grant
pulse, and waiting for the
"float delay" of the CPU,
the
requesting
device may drive the
system bus. This precaution
prevents bus contention. To
return
control of the bus to the
CPU, the alternate bus master
relinquishes bus control and
issues a
release pulse on the same
Bus Request line. The CPU
may drive the system
bus
after
detecting the release pulse.
The alternate bus master should be
tri-stated off the
local
bus and
have other CPU interface
circuits re-enabled within
this time.
DMA
has priority over Interrupt
driven I/O:
In
interrupt driven I/O the I/O
transfer depends upon the
speed at which the
processor
tests and
service a device. Also, many
instructions are required
for each I/O
transfer.
These
factors become bottleneck
when large blocks of data
are to be transferred. While
in
the DMA
technique the I/O transfers take place
without the intervention by
the CPU,
rather
CPU pauses for one bus
cycle. So DMA technique is the
more efficient
technique
for I/O
transfers.
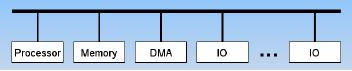
DMA
Configurations:
·
Single Bus Detached DMA
·
Single Bus Integrated
DMA
· I/O
Bus
Single
Bus Detached DMA
In the
example provided by the above
diagram, there is a single
bidirectional bus
connecting
the processor, the
memory,
the DMA
module and all the
I/O
modules.
When a particular
I/O
module
needs to read or write
large
amounts
contiguous data it requests
the processor for direct
memory access. If
permission
is
granted by the processor, the I/O
module sends the read or
write address and the size
of
data
needed to be read or written to
the DMA module. Once the DMA
module
acknowledges
the request, the I/O module is
free to read or write its
contiguous block of
data
from or onto main memory.
Even though in this
situation the processor will
not be
able to
execute while the transfer
is going on (as there is a
just a single bus to
facilitate
transfer
of data), DMA transfer is much faster
then having each word of
memory being
read by
the processor and then being
written to its
location.
Page
317
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
________________________________________________________
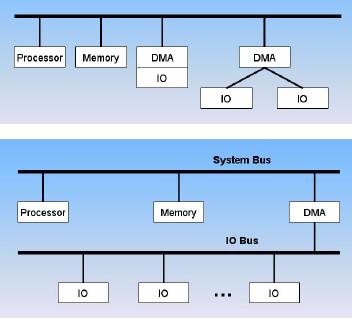
Single
Bus Integrated DMA
In this
configuration the DMA and one
or more
I/O modules are
integrated
without
the inclusion of system
bus
functioning
as the part of I/O
module
or may be
as a separate module
controlling
the I/O module.
IO
Bus
In this
configuration we integrate
the
DMA and I/O
modules through an I/O
bus. So
it will cut the number of
I/O
interfaces
required between DMA and
I/O
module.
Example
An I/O
device transfers data at a rate of
10MB/s over a 100MB/s bus.
The data is
transferred
in 4KB blocks. If the
processor operates at 500MHz, and it
takes a total of
5000
cycles to handle each DMA request,
find the fraction of CPU
time handling the
data
transfer
with and without DMA.
Solution.
Without
DMA
The
processor here copies the
data into memory as it is sent
over the bus. Since
the I/O
device sends data at a rate of
10MB/s over the 100MB/s
bus, 10 % of each
second
is spent
transferring data. Thus 10%
of the CPU time is spent
copying data to
memory.
With
DMA
Time
required in handling each DMA request is
5000 cycles. Since 2500 DMA
requests
are issued (10MB/4KB) the
total time taken is
12,500,000 cycles. As the
CPU
clock is
500MHZ, the fraction of CPU
time spent is 12,500,000/(500x106) or
2.5%.
Example
A hard
drive with a maximum
transfer rate of 1Mbyte/sec is connected
to a 32-bit,
10MIPS
CPU operating at a clock
frequency of 100 MHz. Assume that
the I/O interface
is DMA
based and it takes 500 clock
cycles for the CPU to
set-up the DMA
controller.
Also
assume that the interrupt
handling process at the end of
the DMA transfer takes
an
additional
300 CPU clock cycles. If the
data transfer is done using 2 KB
blocks, calculate
the
percentage of the CPU time
consumed in handling the
hard drive.
Solution
Since the
hard drive transfers at
1MB/sec, and each block size is
2KB, there are
1000/2=
500 blocks transferred/sec
Every DMA
transfer uses 500+300=800
CPU cycles. This gives
us
Page
318
Last
Modified: 01-Nov-06

Advanced Computer
Architecture-CS501
________________________________________________________
800x500 =
400,000 = 400x103
cycles/sec
For
the 100 MHz CPU, this corresponds
to
(400x103) / (100x106)=
4x10-3 = 0.4%
This
would be the case when
the hard drive is
transferring data all the
time. In actual
situation,
the drive will not be active
all the time, and this
number will be much
smaller
than
0.4%.
Another
assumption that is implied in
the previous example is that
the DMA controller is
the
only device accessing the
memory. If the CPU also
tries to access memory,
then
either
the DMAC or the CPU will
have to wait while the
other one is actively
accessing
the
memory. If cache memory is also
used, this can free up main
memory for use by
the
DMAC.
Cycle
Stealing
The DMA
module takes control of the
bus to transfer data to and from
memory by
forcing
the CPU to temporarily
suspend its operation. This
approach is called Cycle
Stealing
because in this approach DMA steals a bus
cycle.
DMA and
Interrupt
breakpoints
during
an instruction cycle
The
figure shows that the
CPU suspends
or pauses
for one bus cycle when
it
needs a
bus cycle, transfers the
data and
then
returns the control back to
the CPU.
I/O
processors
When I/O
module has its own
local
memory to
control a large number of
I/O
devices
without the involvement of
CPU is called I/O processor.
I/O
Channels
When an
I/O module has a capability of
executing a specific set of
instructions for
specific
I/O devices in the memory without
the involvement of CPU is
called I/O
channel.
I/O
channel architecture:
Types
of I/O channels:
Selector
Channel
It is the
DMA controller that can do
block
transfers for several devices
but
only one
at a time.
Page
319
Last
Modified: 01-Nov-06

Advanced Computer
Architecture-CS501
________________________________________________________
Multiplexer
Channel
It is the
DMA controller that can do
block
transfers for several devices
at
once.
Types
of Multiplexer Channel
·
Byte Multiplexer
·
Block Multiplexer
Byte
Multiplexer
·
Byte multiplexer accepts or
transmits characters.
·
Interleaves bytes from
several devices.
· Used
for low speed
devices.
Block
Multiplexer
·
Block multiplexer accepts or
transmits block of characters.
·
Interleaves blocks of bytes
from several devices.
· Used
for high speed
devices.
Virtual
Address:
Virtual
address is generated be the
logical by the memory management
unit for
translation.
Physical
Address:
Physical
address is the address in
the memory.
DMA and
memory system
DMA
disturbs the relationship
between the memory system
and CPU.
Direct
memory access and the memory
system
Without
DMA, all memory accesses are
handled by the CPU, using
address translation
and cache
mechanism. When DMA is implemented
into an I/O system memory
accesses
can be
made without intervening the
CPU for address translation
and cache access. The
problems
created by the DMA in virtual
memory and cache systems can be solved
using
hardware
and software techniques.
Hardware
Software Interface
One
solution to the problem is
that all the I/O transfers
are made through the
cache to
ensure
that modified data are
read and updated in the cache on
the I/O write. This
method
can
decrease the processor
performance because of infrequent
usage of the I/O
data.
Another
approach is that the cache is
invalidated for an I/O read and
for an I/O write,
write-back
(flushing) is forced by the
operating system. This
method is more
efficient
because
flushing of large parts of cache
data is only done on DMA block
accesses.
Third
technique is to flush the
cache entries using a
hardware mechanism, used
in
multiprogramming
system to keep cache
coherent.
Page
320
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
________________________________________________________
SOME
clarifications:
· The
terms "serial" and "parallel"
are with respect to the
computer I/O ports ---
not
with
respect to the CPU. The
CPU always transfers data in
parallel.
· The
terms "programmed I/O",
"interrupt driven I/O" and "DMA" are
with respect
to the
CPU. Each of these terms
refers to a way in which the
CPU handles I/O, or
the
way data flow through
the ports is
controlled.
· The
terms "simplex" and "duplex"
are with respect to the
transmission medium or
the
communication link.
· The
terms "memory mapped I/O" and
"independent I/O" are with
respect to the
mapping
of the interface, i.e., they
refer to the CPU control
lines used in the
interface.
Page
321
Last
Modified: 01-Nov-06
Table of Contents:
- Computer Architecture, Organization and Design
- Foundations of Computer Architecture, RISC and CISC
- Measures of Performance SRC Features and Instruction Formats
- ISA, Instruction Formats, Coding and Hand Assembly
- Reverse Assembly, SRC in the form of RTL
- RTL to Describe the SRC, Register Transfer using Digital Logic Circuits
- Thinking Process for ISA Design
- Introduction to the ISA of the FALCON-A and Examples
- Behavioral Register Transfer Language for FALCON-A, The EAGLE
- The FALCON-E, Instruction Set Architecture Comparison
- CISC microprocessor:The Motorola MC68000, RISC Architecture:The SPARC
- Design Process, Uni-Bus implementation for the SRC, Structural RTL for the SRC instructions
- Structural RTL Description of the SRC and FALCON-A
- External FALCON-A CPU Interface
- Logic Design for the Uni-bus SRC, Control Signals Generation in SRC
- Control Unit, 2-Bus Implementation of the SRC Data Path
- 3-bus implementation for the SRC, Machine Exceptions, Reset
- SRC Exception Processing Mechanism, Pipelining, Pipeline Design
- Adapting SRC instructions for Pipelined, Control Signals
- SRC, RTL, Data Dependence Distance, Forwarding, Compiler Solution to Hazards
- Data Forwarding Hardware, Superscalar, VLIW Architecture
- Microprogramming, General Microcoded Controller, Horizontal and Vertical Schemes
- I/O Subsystems, Components, Memory Mapped vs Isolated, Serial and Parallel Transfers
- Designing Parallel Input Output Ports, SAD, NUXI, Address Decoder , Delay Interval
- Designing a Parallel Input Port, Memory Mapped Input Output Ports, wrap around, Data Bus Multiplexing
- Programmed Input Output for FALCON-A and SRC
- Programmed Input Output Driver for SRC, Input Output
- Comparison of Interrupt driven Input Output and Polling
- Preparing source files for FALSIM, FALCON-A assembly language techniques
- Nested Interrupts, Interrupt Mask, DMA
- Direct Memory Access - DMA
- Semiconductor Memory vs Hard Disk, Mechanical Delays and Flash Memory
- Hard Drive Technologies
- Arithmetic Logic Shift Unit - ALSU, Radix Conversion, Fixed Point Numbers
- Overflow, Implementations of the adder, Unsigned and Signed Multiplication
- NxN Crossbar Design for Barrel Rotator, IEEE Floating-Point, Addition, Subtraction, Multiplication, Division
- CPU to Memory Interface, Static RAM, One two Dimensional Memory Cells, Matrix and Tree Decoders
- Memory Modules, Read Only Memory, ROM, Cache
- Cache Organization and Functions, Cache Controller Logic, Cache Strategies
- Virtual Memory Organization
- DRAM, Pipelining, Pre-charging and Parallelism, Hit Rate and Miss Rate, Access Time, Cache
- Performance of I/O Subsystems, Server Utilization, Asynchronous I/O and operating system
- Difference between distributed computing and computer networks
- Physical Media, Shared Medium, Switched Medium, Network Topologies, Seven-layer OSI Model