 |
Comparison of Interrupt driven Input Output and Polling |
| << Programmed Input Output Driver for SRC, Input Output |
| Preparing source files for FALSIM, FALCON-A assembly language techniques >> |
Advanced Computer
Architecture-CS501
________________________________________________________
Advanced
Computer Architecture
Lecture
No. 28
Reading
Material
Vincent
P. Heuring & Harry F. Jordan
Chapter
8
Computer
Systems Design and Architecture
8.3
Summary
�
Comparison
of Interrupt driven I/O and
Polling
�
Design
Issues
�
Interrupt
Handler Software
�
Interrupt
Hardware
�
Interrupt
Software
Comparison
of Interrupt driven I/O and
Polling
Interrupt
driven I/O is better than
polling. In the case of
polling a lot of time is wasted
in
questioning
the peripheral device
whether it is ready for
delivering the data or not.
In the
case of
interrupt driven I/O the CPU
time in polling is saved.
Now
the design issues involved in
implementation of the interrupts
are twofold. There
would be
a number of interrupts that
could be initiated. Once the
interrupt is there,
how
the
CPU does know which
particular device initiated
this interrupt. So the first
question is
evaluation
of the peripheral device or
looking at which peripheral
device has generated
the
interrupt. Now the second
important question is that
usually there would be a
number
of
interrupts simultaneously available. So
if there are a number of
interrupts then there
should be
a mechanism by which we could
just resolve that which
particular interrupt
should be
serviced first. So there
should be some priority
mechanism.
Design
Issues
There
are two design
issues:
1. Device
Identification
2.
Priority mechanism
Device
Identification
In this
issue different mechanisms could be
used.
� Multiple
interrupt lines
� Software
Poll
Page
282
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
________________________________________________________
�
Daisy
Chain
1.
Multiple Interrupt
Line
This is
the most straight forward
approach, and in this method, a number of
interrupt
lines
are provided between the
CPU and the I/O module.
However, it is impractical to
dedicate
more than a few bus lines or
CPU pins to interrupt lines.
Consequently, even if
multiple
lines are used, it is likely
that each line will have
multiple I/O modules attached
to it.
Thus on each line, one of
the other technique would
still be required.
2.
Software Poll
CPU
polls to identify the
interrupting module and branches to an
interrupt service
routine
on
detecting an interrupt. This
identification is done using special
commands or reading
the
device status register. Special command
may be a test I/O. In this
case, CPU raises
test I/O and
places the address of a
particular I/O module on the
address line. If I/O
module
sets the interrupt then it
responds positively. In the
case of an addressable status
register,
the CPU reads the status
register of each I/O module to
identify the
interrupting
module.
Once the correct module is
identified, the CPU branches to a
device service
routine
which is specific to that
particular device.
Simplified
Interrupt Circuit for an I/O
Interface
For above
two techniques
the
implementation might
require
some hardware.
The
hardware would be
specific
to the processor
which is
being used. For
example,
for the case of
SRC,
simple hardware
machanism
is indicated.
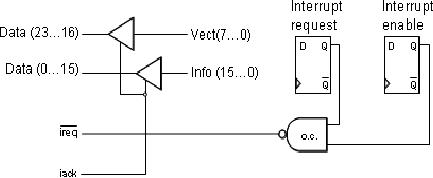
Now
the basic technique
is
handshaking and in this
case of
handshaking, the peripheral
device would initiate an
interrupt. This
interrupt
needs to
be enabled. We will have a mechanism of
ANDing the two signals.
One is
interrupt
enable and other is interrupt request.
Now these two requests
would be passed
on the
CPU. The CPU passes on
the acknowledge signal to
the device. The
acknowledge
signal is
shared and it goes on to different
devices.
The
information about interrupt
vector is given in 8-bits,
from bit 0 to 7, which
is
translated
to bit 16 to 23 on the data
bus. Now the other
16-bits, from 0 to 15 are
mapped
to the
data lines from 0 to 15.
Now both of these are
available through the
tri-state
buffers,
which would be enabled through
interrupt acknowledge.
Page
283
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
________________________________________________________
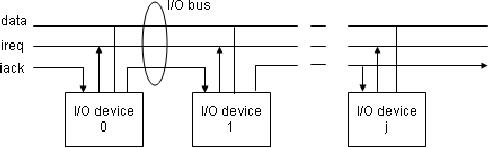
3. Daisy
Chain
The
wired or interrupt signal
allows several devices to request
interrupt simultaneously.
However,
for proper operation one and
only one requesting device
must receive an
acknowledge
signal, otherwise if we have
more than one devices, we would
have a data
bus
contention and the interrupt
information would not be
resolved. The usual solution
is
called a
daisy chain. Assuming that
if we have jth devices requesting
for interrupt then
first
device 0 would receive the
acknowledge signal, so therefore,
iack0=iack. The next
device
would only receive an
acknowledge i.e., the jth
device would receive
an
acknowledge
if the previous device that
means j-1 does not
have an enabled interrupt
request,
that
means
interrupt
was not
initiated
by the
previous
device.
Now the
figure
shows this
concept
in the
form
of
a
connection
from
device 0
to 1. From 0, we see the
acknowledge is generated for
device 1, device 1
generates
acknowledge for device2 and so
on. So this signal
propagates from one
device
to other
device. Logically we could
write it in the form of
equation:
iackj= iack j-1^(reqj-1^enb j-1)
As we
said that the previous
device should not have
generated an interrupt,
that
means
its interrupt was not
enabled and therefore, it
passes on the
acknowledge
signal
from its output to he next
device.
Disadvantages
of Software Poll and Daisy
Chain
The
software poll has a disadvantage is
that it consumes a lot of time,
while the daisy
chain is
more efficient. The daisy
chain has the disadvantage
that the device nearest to
the
CPU
would have highest priority.
So, usually those devices which
require higher
priority
would be
connected nearer to the CPU.
Now in order to get a fair chance
for other
devices,
other mechanisms could be initiated or we
could say that we could
start instead
of device
0 from that device where
the CPU finishes the
last interrupt and could
have a
cyclic
provision to different devices.
Interrupt
Handler Software
Example
using SRC
(Read
from Book, Jordan
page395)
Page
284
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
________________________________________________________
Example
using FALCON-A
As an
example of interrupt-driven I/O,
consider an output device,
such as a parallel
printer
connected to the FALCON-A
CPU. Now suppose that
we want to print a
document
while using an application
program like a word
processor or a spread sheet.
In
this
section, we will explain the
important aspects of hardware and
software for
implementing
an interrupt driven parallel
printer interface for the
FALCON-A. During
this
discussion, we will also explain the
differences and similarities between
this interface
and the
one discussed earlier. To make things
simple, we have made the
assumption that
only one
interrupt pin is available on
the FALCON-A, and only one
interrupt is possible
at a
given time with this
CPU. Implications of allowing
only one interrupt at a time
are
that
�
No NMI is
possible
�
No
nesting of interrupts is possible
�
No
priority structure needed
for multiple devices
�
No
arbitration needed for
simultaneous interrupts
�
No need
for vectored interrupts,
therefore, no need of interrupt
vectors and
interrupt
vector tables
�
Effect of
software initiated interrupts and
internal interrupts (exceptions)
has to
be
ignored in this
discussion
Along
with the previous
assumption, the following assumptions
have also been used:
�
Hardware
sets and clears the interrupt
flag, in addition to handling
other
things
like saving PC,
etc.
� The
address of the ISR is stored at
absolute address 2 in
memory.
� The
ISR will set up a stack in the
memory for saving the
CPU's environment
� One
ASCII character stored per 16-bit
word in the FALCON-A's
memory and
one
character transferred during a
16-bit transfer.
� The
calling program will call
the ISR for printing
the first character
through
the
printer driver.
� Printer
will activate ACKNLG# only
when not BUSY.
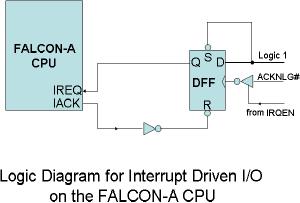
Interrupt
Hardware:
The
logic diagram for the
interrupt
hardware
is shown in the Figure.
The
interrupt
request is synchronized by
handshaking
signals, called IREQ
and IACK.
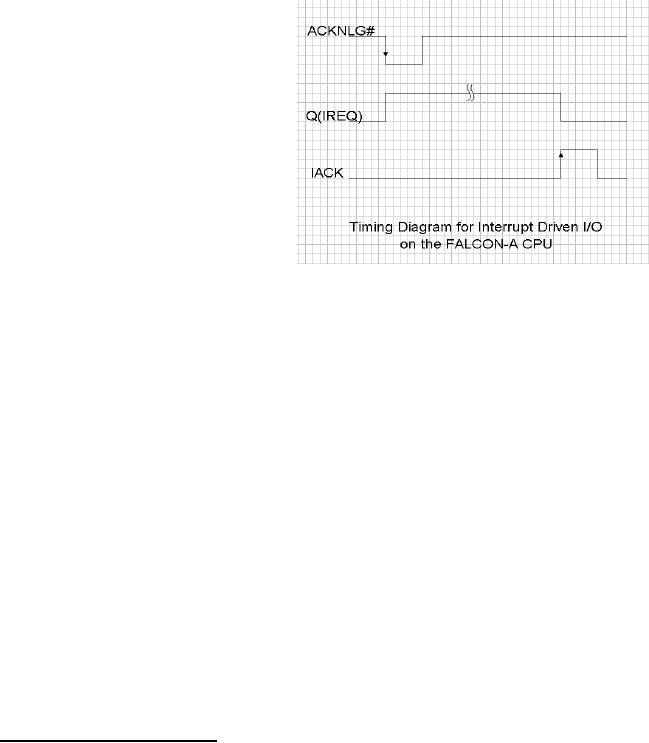
The timing diagram
for
the
handshaking signals used in
the
interrupt
driven I/O is shown in
the
next
Figure. The printer will
assert
IREQ as
soon as the ACKNLG#
Page
285
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
________________________________________________________
signal
goes low (i.e. as soon as
the printer is ready to
accept new data) provided
that
IREQN=1.
The processor will complete
the current instruction and respond
by
executing
the interrupt service
routine. The inverting
tri-state buffer at the
clock input
of the D
flip flop is enabled by IRQEN.
This will make sure that after
the current print
job is
complete, additional requests on
IREQ are disabled. This can happen as a
result
of the
printer being available even
through the user may not
have requested a
print
operation.
The IACK line from the
CPU is connected to the
asynchronous reset, R, of
the D
flip flop so that the
same interrupt request from
the printer is not presented
again
to the
CPU. The asynchronous set
input of the D flip flop,
labeled S in the diagram,
is
permanently
connected to logic 1.
This will
make sure that the flip
flop
will
never be set
asynchronously.
The D
input is also permanently
connected
to logic 1, as a result of
which
the flip flop will always be
set
synchronously
in response to
ACKNLG#
provided IRQEN=1.
Recall
that IRQEN is bit 4 on
the
centronics
control port at
logical
address
2, and this is mapped
onto
address
60 of the FALCON-A's I/O
space.
The rest of the hardware
is
case of
the same as in the case of
the programmed I/O
example.
Interrupt
Software:
Our
software for the interrupt
driven printer example consists of
three parts:
1).
Dummy calling program
2).
Printer Driver
3).
ISR
We are
assuming that normal processing is
taking place19
e.g., a
word processor is
executing.
The user wants to print a
document. This
19
Since
only one interrupt is
possible, a question may
arise about the way
the print command is
presented
to the
word processor. It can be
assumed that polling is used
for the input device in this
case.
Page
286
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
________________________________________________________
document
is placed in a buffer by the word
processor. This buffer is usually
present
somewhere
else in the memory. The
responsibility of the calling
program is to pass
the
number of
bytes to be printed and the
starting address of the
buffer where these bytes
are
stored to
the printer driver. The
calling program can also be called
the main program.
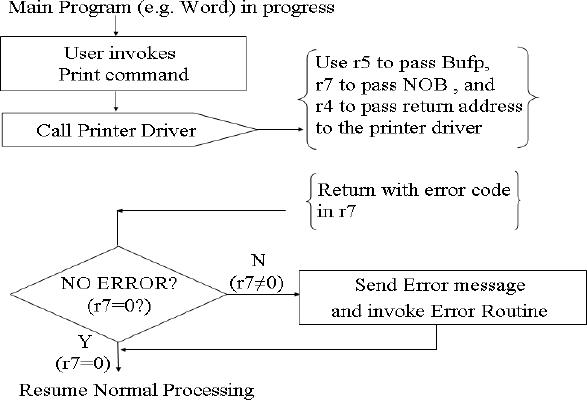
Suppose
that the total number of
bytes to be printed are 40.
(They are placed in a
buffer
having
the starting address 1024.)
When the user invokes the
print command, the
calling
program
calls the printer driver and
passes these two parameters
in r7 and r5 respectively.
The
return address of the
calling program is stored in r4. A
dummy calling program
code
is given
below.
Bufp,
NOB, PB, and temp are
the spaces reserved in memory
for later use in the
program.
The
first instruction is jump
[main]. It is stored at
absolute memory address 0 by
using
the
.org
0 directive.
It will transfer control to the
main program. The first
instruction of
the
main program is placed at address
"main", which
is the entry point in this
example.
Note
that the entry point is
different in this case from
the reset address, which is
address 0
for
the FALCON-A. Also note
that the address of the
first instruction in the
printer driver
is stored at
address "a4PD"
using
the .sw
directive.
This value is then brought
into r6.
The
main program calls the
printer driver by using the
instruction call
r4, r6. In an
actual
program,
after returning from the
printer driver, the normal
processing resumes and if
there
are any error conditions,
they will be handled at this
point. Next, consider the
code
for
the printer driver, shown in
the attached text
box.
Page
287
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
________________________________________________________
;
filename: Example_Falcon-A
.asmfa
;This
program sends a single
character
;to a
FALCON-A parallel
printer
;using an
interrupt driven I/O
interface
;
;
Notes:
; 1.
8-bit printer data bus
connected to
;
D<7..0> of the FALCON-A
(remember big-endian)
;
Thus, the printer
actually uses addresses 57,
59 & 61
;
; 2. one
character per 16-bits of data
xfered ;
;
.org
0
jump
[main]
a4ISR:
.sw
beginISR
a4PD:
.sw
Pdriver
dv1:
.sw
1024
dv2:
.sw
40
Bufp:
.dw
1
NOB:
.dw
1
PB:
.dw
1
temp:
.dw
6
;
; Dummy
Calling Program, e.g., a
word processor
;
.org
32
main:
load
r6, [a4PD]
;r6
holds address of printer
driver
;
; user
invokes print command
here
;
load
r5, [dv1]
;Prepare
registers for passing
load
r7, [dv2]
;
information about print
buffer.
;
;
; call
printer driver
;
call
r4, r6
; Handle
error conditions, if any ,
upon return.
; Normal
processing resumes
;
halt
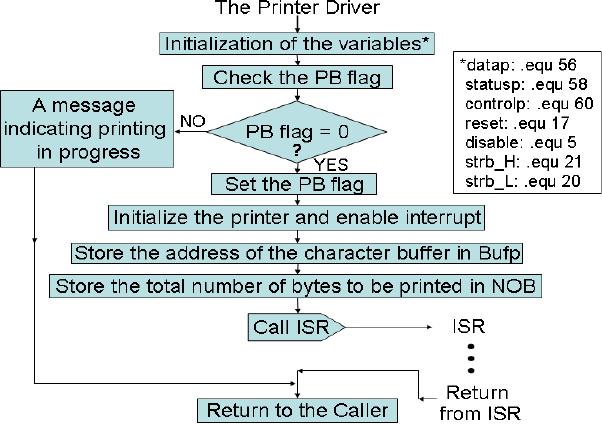
The
printer driver is loaded at address
50. Initialization of the
variables includes
setting
of port
addresses, variables for the
STROBE# pulse, initializing
the printer and
enabling
its
IRQEN. The variables can be
defined anywhere in the
program because they
reserve
Page
288
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
________________________________________________________
no memory
space. When the printer
driver starts, the PB flag is
tested to make sure that a
previous
print job is not in progress. If
so, the ISR is not
invoked and a message is
returned
to the main program
indicating that printing is in progress.
This may display a
"printer
busy" icon on the user's
screen, or cause some other
appropriate action. If
the
printer
is available, it is initialized by the
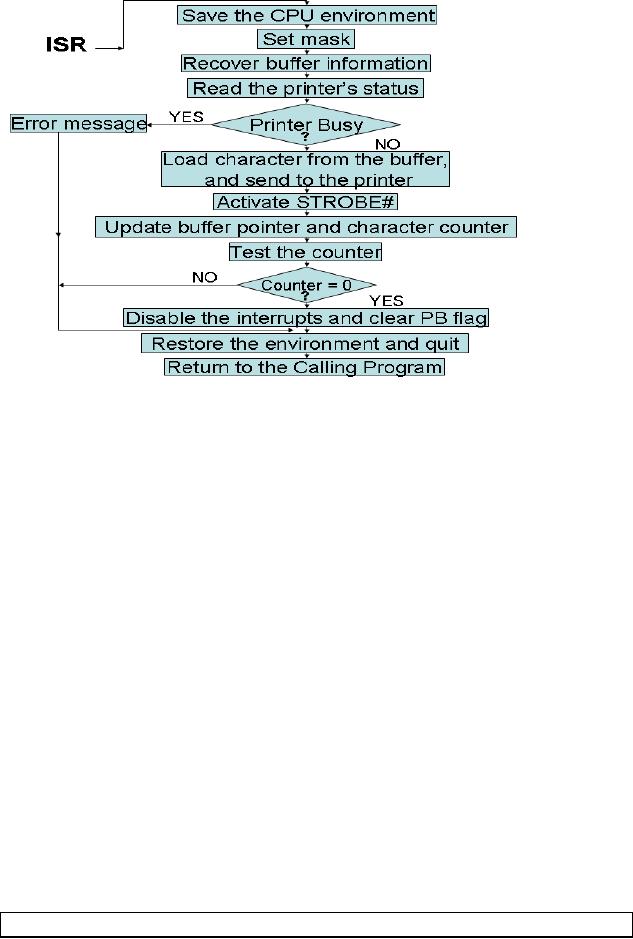
driver. The following
activities are also
performed
by the driver (see the
attached flow chart
also).
�
Set
port addresses
�
Set up
variables for the STROBE#
puls
�
Initialize
printer and enable its
IRQEN.
�
Set up
printer ISR by pointing to
the buffer and initializing
counter
�
Make sure
that the previous print
job is not in
progress
�
Set PB
flag to block further print
jobs till current one is
complete
�
Invoke
ISR for the first
time
�
Pass
error message to main
program if ISR reports an
error
�
Return to
main program
The
code and flow chart for
the interrupt service
routine (ISR) are discussed
in the next
few
paragraphs.
Page
289
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
________________________________________________________
; Printer
driver
;
.org
50
;
starting address of Printer
driver
;
datap:
.equ
56
statusp:
.equ
58
controlp:
.equ
60
;
reset:
.equ
17
; or
11h
; used to
set unidirectional, enable
interrupts,
; auto
line feed, and strobe
high
disable:
.equ
5
;
strb_H:
.equ
21
; or
15h
strb_L:
.equ
20
; or
14h
;
; check
PB flag first, if
set,
; return
with message.
;
Pdriver:
load r1, [PB]
jnz
r1, [message]
movi
r1, 1
store r1,
[PB]
; a 1 in PB
indicates Print In
Progress
movi
r1, reset
; use r1
for data xfer
out
r1, controlp
store r5,
[Bufp]
store r7,
[NOB]
;
;
int
;
jump
[finish]
message:
nop
; in
actual situation, put a
message routine here
;to
indicate print in
progress
finish:
ret r4
;
We have
assumed that the address of
the ISR is stored at absolute
memory address 2 by
the
operating system. One way to
do that is by using the .sw
directive
(as done in the
dummy
calling program). The symbol
sw
stands
for "storage of word". It
enables the user
to
identify storage for a
constant, or the value of a
variable, an address or a label at
a
fixed
memory location during the
assembly process.
Page
290
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
________________________________________________________
These
values become part of the
binary file and are then
loaded into the memory
when
the
binary file is loaded and executed. In
response to a hardware interrupt or
the software
interrupt
int,
the
control unit of the FALCON-A
CPU will pick up the address
of the first
instruction
in the ISR from memory
location 2, and transfer control to
it. This effectively
means
that the behavioral RTL of
the int
instruction
will be as shown below:
int
IPC← PC, PC
←
M[2], IF
←
0
The
IPC register in the CPU is a
holding place for the
current value of the PC. It
is
invisible
to the programmer. Since the
iret
instruction
should always be the
last
instruction
in every ISR, its behavior
RTL will be as shown below:
iret
PC ← IPC, IF
←
1
The
saving and restoring of the
other elements of the CPU
environment like the
general
purpose registers
should be done within the
ISR. The five store
instructions
at the
beginning
are used to save these
registers into the memory
block starting at
address
temp, and the
five load
instructions
at the end are used to restore
these registers to their
original
values.
; ISR
starts here
Page
291
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
________________________________________________________
.org
100
beginISR:
movi r6, temp
store r1,
[r6]
store r3,
[r6+2]
store r4,
[r6+4]
store r5,
[r6+6]
store r7,
[r6+8]
movi
r3, 1
shiftl
r3,r3,7
; to set
mask to 0080h
load
r5, [Bufp]
; not
necessary to use r5 & r7 here
load
r7, [NOB]
; using
r7 as character counter
in r1,
statusp
and
r1,r1,r3
; test if
BUSY = 1 ?
jnz
r1, [error]
; error
if BUSY = 1
load
r1, [r5]
; get
char from printer
buffer
out
r1, datap
movi
r1, strb_L
out
r1, controlp
movi
r1, strb_H
out
r1, controlp
addi r5,
r5, 2
store r5,
[Bufp]
; update
buffer pointer
subi
r7, r7, 1
; update
character counter
store r7,
[NOB]
jz r7,
[suspend]
jump
[last]
suspend: store
r7, [PB] ; clear PB
flag
movi
r1, disable
; disable
future interrupts
till
out
r1, controlp
; printer
driver called again
jump
[last]
error:
movi r7, -1
; error
code in r7
; other
error codes go here
;
last:
load r1, [r6]
load
r3, [r6+2]
load
r4, [r6+4]
load
r5, [r6+6]
load
r7, [r6+8]
iret
.end
After
setting the mask to 80h in
r3, the current value of
the buffer pointer and the
number
of bytes
to be printed are brought
from the memory into r5 and
r7 respectively. After a
byte is
printed, these values are
updated in the memory for
use by the ISR when it
is
invoked
again. The rest of the code
in the ISR is the same as it
was in case of the
programmed
I/O example. Note that we
are testing the printer's
BUSY flag within
the
Page
292
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
________________________________________________________
ISR
also. However, the
difference here is that this
testing is being done for a
different
reason, and it is done
only once for each call to
the ISR.
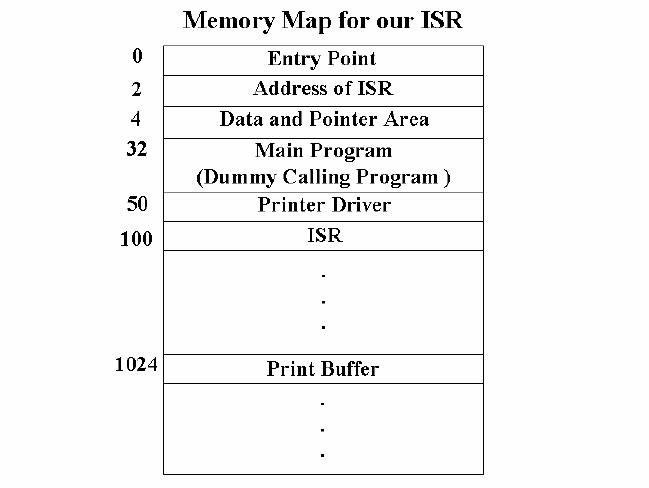
The
memory map for this program
is as shown in the Figure.
The point to be noted
here
is that
the ISR can be loaded anywhere in
the memory but its
address will be present at
memory
location 2 i.e. M[2].
Page
293
Last
Modified: 01-Nov-06
Table of Contents:
- Computer Architecture, Organization and Design
- Foundations of Computer Architecture, RISC and CISC
- Measures of Performance SRC Features and Instruction Formats
- ISA, Instruction Formats, Coding and Hand Assembly
- Reverse Assembly, SRC in the form of RTL
- RTL to Describe the SRC, Register Transfer using Digital Logic Circuits
- Thinking Process for ISA Design
- Introduction to the ISA of the FALCON-A and Examples
- Behavioral Register Transfer Language for FALCON-A, The EAGLE
- The FALCON-E, Instruction Set Architecture Comparison
- CISC microprocessor:The Motorola MC68000, RISC Architecture:The SPARC
- Design Process, Uni-Bus implementation for the SRC, Structural RTL for the SRC instructions
- Structural RTL Description of the SRC and FALCON-A
- External FALCON-A CPU Interface
- Logic Design for the Uni-bus SRC, Control Signals Generation in SRC
- Control Unit, 2-Bus Implementation of the SRC Data Path
- 3-bus implementation for the SRC, Machine Exceptions, Reset
- SRC Exception Processing Mechanism, Pipelining, Pipeline Design
- Adapting SRC instructions for Pipelined, Control Signals
- SRC, RTL, Data Dependence Distance, Forwarding, Compiler Solution to Hazards
- Data Forwarding Hardware, Superscalar, VLIW Architecture
- Microprogramming, General Microcoded Controller, Horizontal and Vertical Schemes
- I/O Subsystems, Components, Memory Mapped vs Isolated, Serial and Parallel Transfers
- Designing Parallel Input Output Ports, SAD, NUXI, Address Decoder , Delay Interval
- Designing a Parallel Input Port, Memory Mapped Input Output Ports, wrap around, Data Bus Multiplexing
- Programmed Input Output for FALCON-A and SRC
- Programmed Input Output Driver for SRC, Input Output
- Comparison of Interrupt driven Input Output and Polling
- Preparing source files for FALSIM, FALCON-A assembly language techniques
- Nested Interrupts, Interrupt Mask, DMA
- Direct Memory Access - DMA
- Semiconductor Memory vs Hard Disk, Mechanical Delays and Flash Memory
- Hard Drive Technologies
- Arithmetic Logic Shift Unit - ALSU, Radix Conversion, Fixed Point Numbers
- Overflow, Implementations of the adder, Unsigned and Signed Multiplication
- NxN Crossbar Design for Barrel Rotator, IEEE Floating-Point, Addition, Subtraction, Multiplication, Division
- CPU to Memory Interface, Static RAM, One two Dimensional Memory Cells, Matrix and Tree Decoders
- Memory Modules, Read Only Memory, ROM, Cache
- Cache Organization and Functions, Cache Controller Logic, Cache Strategies
- Virtual Memory Organization
- DRAM, Pipelining, Pre-charging and Parallelism, Hit Rate and Miss Rate, Access Time, Cache
- Performance of I/O Subsystems, Server Utilization, Asynchronous I/O and operating system
- Difference between distributed computing and computer networks
- Physical Media, Shared Medium, Switched Medium, Network Topologies, Seven-layer OSI Model