 |
3-bus implementation for the SRC, Machine Exceptions, Reset |
| << Control Unit, 2-Bus Implementation of the SRC Data Path |
| SRC Exception Processing Mechanism, Pipelining, Pipeline Design >> |

Advanced Computer
Architecture-CS501
Advanced
Computer Architecture
Lecture
No. 17
Reading
Material
Vincent
P. Heuring&Harry F. Jordan
Chapter
4
Computer
Systems Design and Architecture
4.6.2,
4.7, 4.8
Summary
·
3-bus
implementation for the
SRC
·
The
Machine Reset
·
Machine
Exceptions
A
3-bus Implementation for the
SRC
Let us
now look at a 3-
bus
implementation of the
data-path
for the SRC as
shown in
the figure. Two
buses,
`A' and `B' bus for
reading,
and a bus `C' for
writing,
are part of this
implementation.
Hence
all
the special purpose as
well
as the general
purpose
registers have
two
read ports and one
write
port.
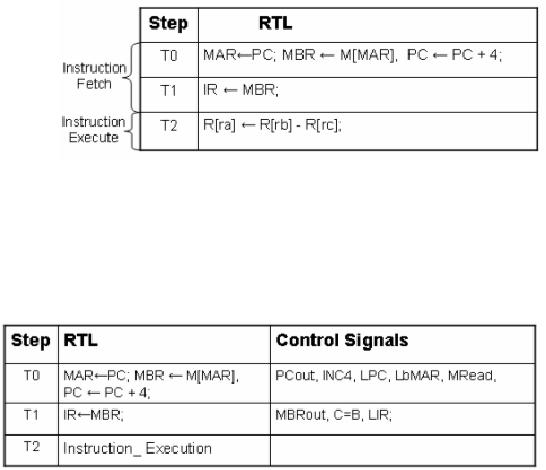
Structural
RTL for the Subtract Instruction
using the 3-bus Data
Path
Implementation
We now
consider how instructions
are fetched and executed in
3-bus architecture.
For
this
purpose, the same `sub'
instruction example is
followed.
The
syntax of the subtract
instructions is
sub
ra, rb, rc
The
structural RTL for implementing
this instruction is given in
the table. We observe
that in
this table, only two
time steps are required
for the instruction fetch
phase. At
time
step T0, the Memory Address
Register receives the value of
the Program Counter.
This is
done in the initial phase of
the time step T0.
Then, the Memory Buffer
Register
Page
195
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
receives
the memory word indexed by
the MAR, and the PC value is
incremented. At
time
step T1, the instruction
register is assigned the
instruction word that was
loaded
into
the MBR in the previous time
step. This concludes the
instruction fetch and
now
the
instruction execution can
commence.
In the
next time step, T2,
the instruction is executed by
subtracting the values
of
register
rc from rb, and assigning
the result to the register
ra.
At the
end of each sequence, the
timing step generator is
initialized to T0
Control
Signals for the Fetch
Operation
The
given table lists the
control signals in the
instruction fetch phase. The
control
signals
for the execute phase can be
written in a similar
fashion.
The
Machine Reset
In this
section, we will discuss the
following
· Reset
operation
· Behavioral
RTL for SRC reset
· Structural
RTL for SRC reset
The
reset operation
Reset
operation is required to change the
processor's state to a known, defined
value.
The
two essential features of a reset
instruction are clearing the
control step counter
and
reloading
the PC to a predefined value.
The control step counter is
set to zero so that
operation
is restarted from the instruction
fetch phase of the next
instruction. The PC is
reloaded
with a predefined value
usually to execute a specific
recovery or initializing
program.
In most
implementations the reset
instruction also clears the interrupt
enable flags so as
to disable
interrupts during the
initialization operation. If a condition
code register is
present,
the reset instruction
usually clears it, so as to clear
any effects of
previously
executed
instructions. The external
flags and processor state registers
are usually
cleared
too.
Page
196
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
The
reset instruction is mainly
used for debugging purposes, as
most processors halt
operations
immediately or within a few
cycles of receiving the
reset instruction.
The
processors
state may then be examined
in its halted state.
Some
processors have two types of
reset operations. Soft reset
implies initializing PC
and
interrupt flags. Hard reset
initializes other processor
state registers in addition to
PC and
interrupts enable flags. The
software reset instruction
asserts the external
reset
pin of
the processor.
Reset
operation in SRC
Hard
Reset
The SRC
should perform a hard reset
upon receiving a start
(Strt) signal. This
initializes
the PC
and the general registers.
Soft
Reset
The SRC
should perform a soft reset
upon receiving a reset (rst)
signal. The soft
reset
results
in initialization of PC only.
The
reset signal in SRC is assumed to be
external and asynchronous.
PC
Initialization
There
are basically two approaches
to initialize a PC.
1.
Direct Approach
The PC is
loaded with the address of
the startup routine upon
resetting.
2.
Indirect Approach
The PC is
initialized with the address
where the address of the
startup routine is
located.
The reset instruction loads
the PC with the address of a
jump instruction. The
jump
instruction in turn contains
the address of the required
routine.
An
example of a reset operation is
found in the 8086 processor. Upon
receiving the
reset
instruction the 8086 initializes
its PC with the address
FFFF0H. This memory
location
contains a jump instruction to
the bootstrap loader
program. This program
provides
the system
initialization
Behavioral
RTL for SRC Reset
The
original behavioral RTL for SRC
without any reset operation
is:
Instruction_Fetch
:=(! Run&Strt: (Run ← 1;
instruction_Fetch,
Run : (IR
←
M
[PC]; PC ← PC+4;instruction_execution)),
instruction_execution:=
(ld (:=op=1...) ;
This
recursive definition implies
that each instruction at the
address supplied by PC is
executed.
The modified RTL after
adding the reset capability
is
Instruction_Fetch:=(!
Run&Strt :( Run ← 1,
PC, R
[0...31] ← 0),
Run&!Rst :( IR
←
M
[PC],
PC ← PC+4,
instruction_execution);
Run&Rst:(
Rst ← 0, PC ← 0);
instruction_Fetch),
The
modified definition includes
testing the value of the
"rst" signal after execution
of
each
instruction. The processor
may not be halted in the
midst of an instruction in
the
RTL
definition
To
actually implement these
changes in the SRC, the
following modification
are
required
to add the reset operation
to the structural RTL for
SRC:
Page
197
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
·
A check
for the reset signal on
each clock cycle
·
A control
signal for clearing the
PC
·
A control
signal to load zero to
control step counter
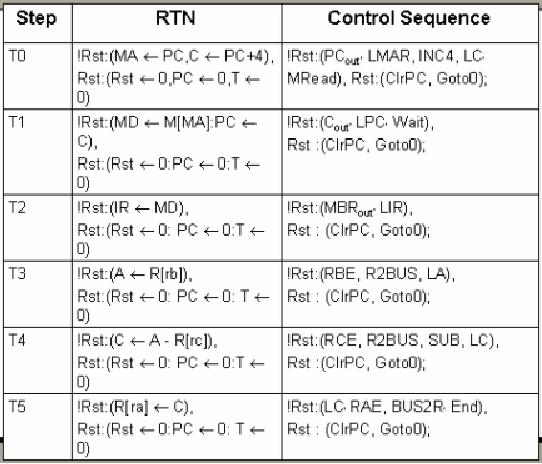
Example:
The sub instruction with
RESET processing
To
actually reset the processor
in the midst of an instruction,
the "Rst" condition
must
be tested
after each clock
cycle.
Let us
examine the contents of each
phase in the given table. In
step T0, if the
Rst
signal is
not asserted, the address of
the new instruction is
delivered to memory and
the
value of
PC is incremented by 4 and stored in another
register. If the "Rst"
signal is
asserted,
the "Rst" signal is
immediately cleared, the PC is cleared to
zero and T, the
step
counter is also set to zero.
This behavior (in case of
`Rst' assertion) is the same
for
all
steps. In step T1, if the
rst signal is not asserted,
the value stored at the
delivered
memory
word is stored in the memory
data register and the PC is
set to its
incremented
value.
In step
T2, the stored memory data
is transferred to the instruction
register.
In step
T3, the register operand
values are read.
In step
T4, the mathematical
operation is executed.
In step
T5, the calculated value is
written back to register
file.
During
all these steps if the
Rst signal is asserted, the
value of PC is set to 0 and
the
value of
the step counter is also set
to zero.
Page
198
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
Machine
Exceptions
·
Anything
that interrupts the normal
flow of execution of instructions in
the
processor
is called an exception.
·
Exceptions may be generated by an
external or internal event
such as a mouse
click or
an attempt to divide by zero
etc.
·
External exceptions or interrupts
are generally asynchronous
(do not depend on
the
system clock) while internal
exceptions are synchronous
(paced by internal
clock)
The
exception process allows
instruction flow to be modified, in
response to internal or
external
events or anomalies. The
normal sequence of execution is
interrupted when an
exception
is thrown.
Exception
Processing
A
generalized exception handler
should include the following
mechanisms:
1. Logic to
resolve priority
conflicts. In case
of nested exceptions or an
exception
occurring
while another is being
handled the processor must
be able to decide
which
exception bears the higher
priority so as to handle it first.
For example, an
exception
raised by a timer interrupt
might have a higher priority
than keyboard
input.
2. Identification
of interrupting device. The
processor must be able to identify
the
interrupting
device that it can to load
the appropriate exception
handler routine.
There
are two basic approaches
for managing this
identification: exception
vectors
and "information" register. The
exception vector contains
the address of
the
exception handling routine.
The interrupting process
fills the exception
vector
as soon as
the interruption is acknowledged.
The disadvantage of this approach
is
that a
lot of space may be taken up
by vectors and exception handler
codes.
In the
information register, only one
general purpose exception handler is
used.
The PC is
saved and the address of the
general purpose register is loaded into
the
PC.
The interrupting process
must fill the information
register with information
to
allow
identification of the cause and
type of exception.
3. Saving
the processor state. As
stated earlier the processor
state must be saved
before
jumping to the exception
handler routine. The state
includes the current
value of
the PC, general purpose registers,
condition vector and external
flags.
4. Exception
disabling during critical
operation. The
processor must disable
interrupts
while it is switching context
from the interrupted process
to the
interrupting
process, so that another
exception might not disrupt
the transition.
Examples of
Exceptions
·
Reset Exception
Reset
operation is treated as an exception by
some machines e.g. SPARC
and
MC68000.
·
Machine Check
This is
an external exception caused by
memory failure
· Data
Access Exception
This
exception is generated by memory
management unit to protect against
illegal
accesses.
·
Instruction Access
Exception
Similar
to data access
exception
Page
199
Last
Modified: 01-Nov-06
Advanced Computer
Architecture-CS501
·
Alignment
Exception
Generated to
block misaligned data
access
Types
of Exception
·
Program
Exceptions
These are
exceptions raised during the
process of decoding and executing
the
instruction.
Examples are illegal
instruction, raised in response to
executing an
instruction
which does not belong to
the instruction set. Another
example would
be the
privileged instruction
exception.
·
Hardware
Exceptions
There
are various kinds of
hardware exceptions. An example
would be of a timer
which
raises an exception when it
has counted down to
zero.
·
Trace
and debugging Exceptions
Variable
trace and debugging is a tricky task. An
easy approach to make it
possible is
through the use of traps.
The exception handler which
would be called
after
each instruction execution
allows examination of the
program variables.
·
Nonmaskable
Exceptions
These are
high priority exceptions reserved
for events with
catastrophic
consequences
such as power loss. These
exceptions cannot be suppressed by
the
processor
under any condition. In case
of a power loss the processor
might try to
save
the system state to the
hard drive, or alert an
alternate power
supply.
·
Interrupts
(External Exceptions)
Exception
handlers may be written for
external interrupts, thus
allowing programs
to respond to
external events such as
keyboard or mouse events.
Page
200
Last
Modified: 01-Nov-06
Table of Contents:
- Computer Architecture, Organization and Design
- Foundations of Computer Architecture, RISC and CISC
- Measures of Performance SRC Features and Instruction Formats
- ISA, Instruction Formats, Coding and Hand Assembly
- Reverse Assembly, SRC in the form of RTL
- RTL to Describe the SRC, Register Transfer using Digital Logic Circuits
- Thinking Process for ISA Design
- Introduction to the ISA of the FALCON-A and Examples
- Behavioral Register Transfer Language for FALCON-A, The EAGLE
- The FALCON-E, Instruction Set Architecture Comparison
- CISC microprocessor:The Motorola MC68000, RISC Architecture:The SPARC
- Design Process, Uni-Bus implementation for the SRC, Structural RTL for the SRC instructions
- Structural RTL Description of the SRC and FALCON-A
- External FALCON-A CPU Interface
- Logic Design for the Uni-bus SRC, Control Signals Generation in SRC
- Control Unit, 2-Bus Implementation of the SRC Data Path
- 3-bus implementation for the SRC, Machine Exceptions, Reset
- SRC Exception Processing Mechanism, Pipelining, Pipeline Design
- Adapting SRC instructions for Pipelined, Control Signals
- SRC, RTL, Data Dependence Distance, Forwarding, Compiler Solution to Hazards
- Data Forwarding Hardware, Superscalar, VLIW Architecture
- Microprogramming, General Microcoded Controller, Horizontal and Vertical Schemes
- I/O Subsystems, Components, Memory Mapped vs Isolated, Serial and Parallel Transfers
- Designing Parallel Input Output Ports, SAD, NUXI, Address Decoder , Delay Interval
- Designing a Parallel Input Port, Memory Mapped Input Output Ports, wrap around, Data Bus Multiplexing
- Programmed Input Output for FALCON-A and SRC
- Programmed Input Output Driver for SRC, Input Output
- Comparison of Interrupt driven Input Output and Polling
- Preparing source files for FALSIM, FALCON-A assembly language techniques
- Nested Interrupts, Interrupt Mask, DMA
- Direct Memory Access - DMA
- Semiconductor Memory vs Hard Disk, Mechanical Delays and Flash Memory
- Hard Drive Technologies
- Arithmetic Logic Shift Unit - ALSU, Radix Conversion, Fixed Point Numbers
- Overflow, Implementations of the adder, Unsigned and Signed Multiplication
- NxN Crossbar Design for Barrel Rotator, IEEE Floating-Point, Addition, Subtraction, Multiplication, Division
- CPU to Memory Interface, Static RAM, One two Dimensional Memory Cells, Matrix and Tree Decoders
- Memory Modules, Read Only Memory, ROM, Cache
- Cache Organization and Functions, Cache Controller Logic, Cache Strategies
- Virtual Memory Organization
- DRAM, Pipelining, Pre-charging and Parallelism, Hit Rate and Miss Rate, Access Time, Cache
- Performance of I/O Subsystems, Server Utilization, Asynchronous I/O and operating system
- Difference between distributed computing and computer networks
- Physical Media, Shared Medium, Switched Medium, Network Topologies, Seven-layer OSI Model