 |
Hard Drive Technologies |
| << Semiconductor Memory vs Hard Disk, Mechanical Delays and Flash Memory |
| Arithmetic Logic Shift Unit - ALSU, Radix Conversion, Fixed Point Numbers >> |

Hard
Drive Technologies
8
"It
would appear that we
have
reached
the limits of what it is
possible
to achieve with
computer technology,
although
one
should be careful with
such
statements,
as they tend to
sound
pretty silly in five
years."
--JOHN VON NEUMANN, 1949
In this
chapter, you will
learn
O
f all
the hardware on a PC, none
gets more attention--or
gives more
how
to
anguish--than
the hard drive. There's a
good reason for this: if the
hard
Explain
how hard drives
work
■
drive
breaks, you lose data. As
you probably know, when
the data goes,
you
Identify
and explain the
ATA
■
have to
redo work or restore from
backup--or worse. It's good
to worry about
hard
drive interfaces
the
data, because the data
runs the office, maintains the
payrolls, and stores
the
Identify
and explain the
SCSI
■
hard
drive interfaces
e-mail.
This level of concern is so
strong that even the
most neophyte PC
users
Describe
how to protect data
■
are
exposed to terms such as IDE,
ATA, and
controller--even
if they don't put
with
RAID
the
terms into practice!
Explain
how to install
drives
■
This
chapter focuses on how hard
drives work, beginning with
the internal
Configure
CMOS and install
■
drivers
layout
and organization of the hard
drive. You'll look at the different
types of
Troubleshoot
hard drive
■
hard
drives used today (PATA,
SATA, and SCSI), how they
interface with the
installation
PC,
and how to install them
properly into a system. The
chapter covers how
more
than one drive may work with
other drives to provide data
safety and
improve
speed through a feature called
RAID. Let's get
started.
101
How
Hard Drives Work
■
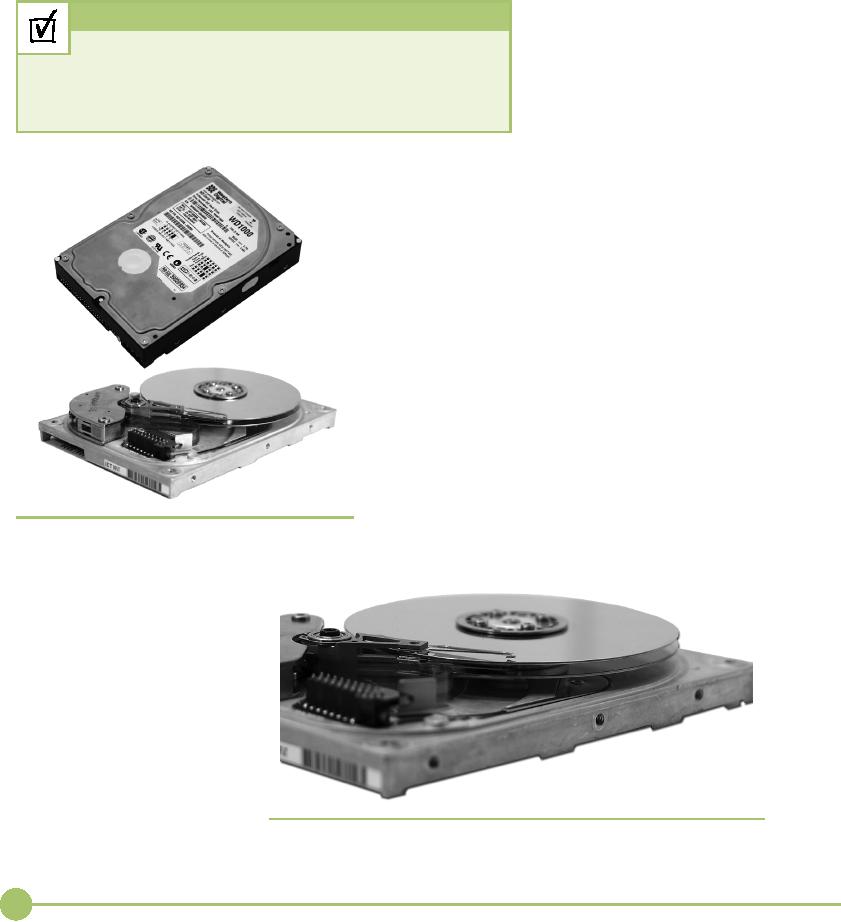
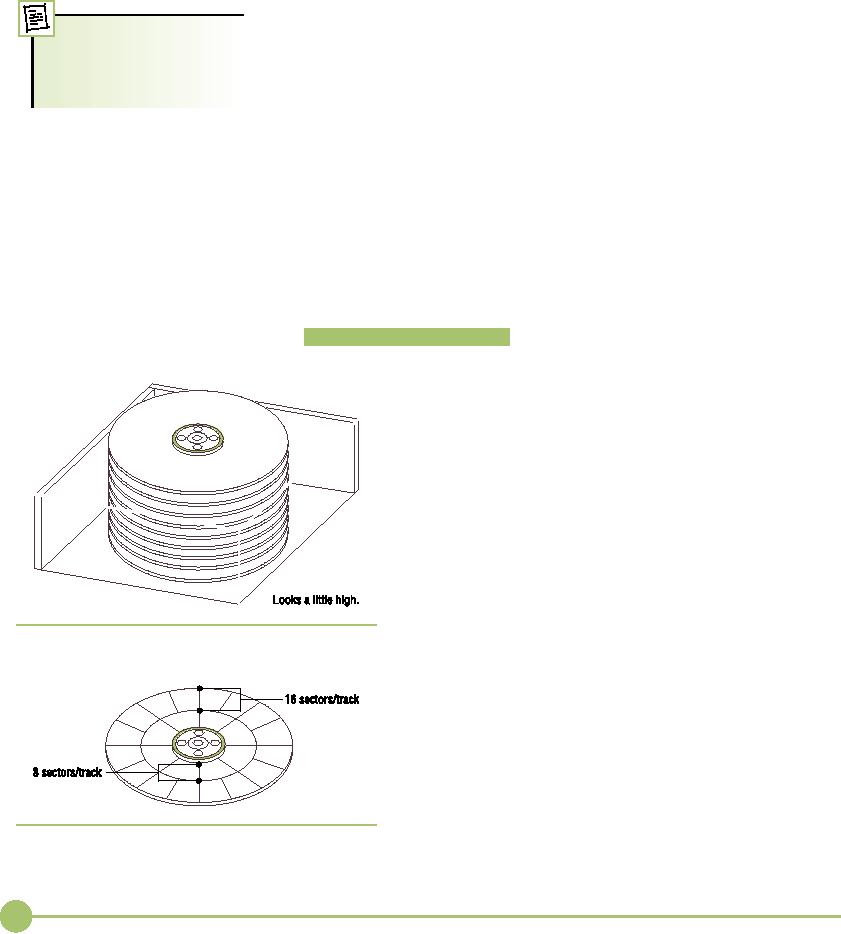
All hard
drives are composed of
individual disks, or platters,
with
read/
write
heads on actuator arms
controlled by a servo motor--all
contained in
a sealed
case that prevents contamination by
outside air (see Figure
8.1).
The
aluminum platters are
coated
with a magnetic medium.
Cross
Check
Two tiny
read/write heads ser-
vice
each platter, one to read
the
Implementing
Hard Drives
top and
the other to read the
bot-
In the
Essentials book you covered
the process of implementing
a
tom of
the platter (see Figure
8.2).
preinstalled
drive. What are the two
steps that must be performed
on ev-
The
coating on the platters
is
ery
installed hard drive so that
the operating system can
use the drive?
phenomenally
smooth! It has to
be, as
the read/write heads
actu-
ally
float on a cushion of air
above
the
platters, which spin at
speeds between 3500 and
10,000
rpm.
The distance (flying height)
between the heads and
the
disk
surface is less than the
thickness of a fingerprint.
The
closer
the read/write heads are to
the platter, the
more
densely
the data packs onto
the drive. These
infinitesimal
tolerances
demand that the platters
never be exposed to
out-
side
air. Even a tiny dust
particle on a platter would act
like
a
mountain in the way of the
read/write heads and would
cause
catastrophic damage to the
drive. To keep the air
clean
inside
the drive, all hard drives
use a tiny, heavily
filtered
aperture
to keep the air pressure
equalized between the
interior
and the exterior of the
drive.
Data
Encoding
Although
the hard drive stores data in
binary form, visual-
izing a
magnetized spot representing a
one and a non-mag-
netized
spot representing a zero
grossly oversimplifies
the
process. Hard drives store
data in tiny magnetic
�
Figure
8.1
Inside
the hard drive
�
Figure
8.2
Top
and bottom read/write heads
and armatures
102
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
fields--think
of them as tiny
magnets
that
can be placed in either
direction on
the
platter, as shown in Figure
8.3. Each
tiny
magnetic field, called a flux,
can
�
Figure
8.3 Data
is stored in tiny magnetic
fields.
switch
back and forth through a
process
called a
flux
reversal (see
Figure 8.4).
Electronic
equipment can read
and
write
flux reversals much faster
and
easier
than it can magnetize or not
mag-
netize a
spot to store a one or a
zero.
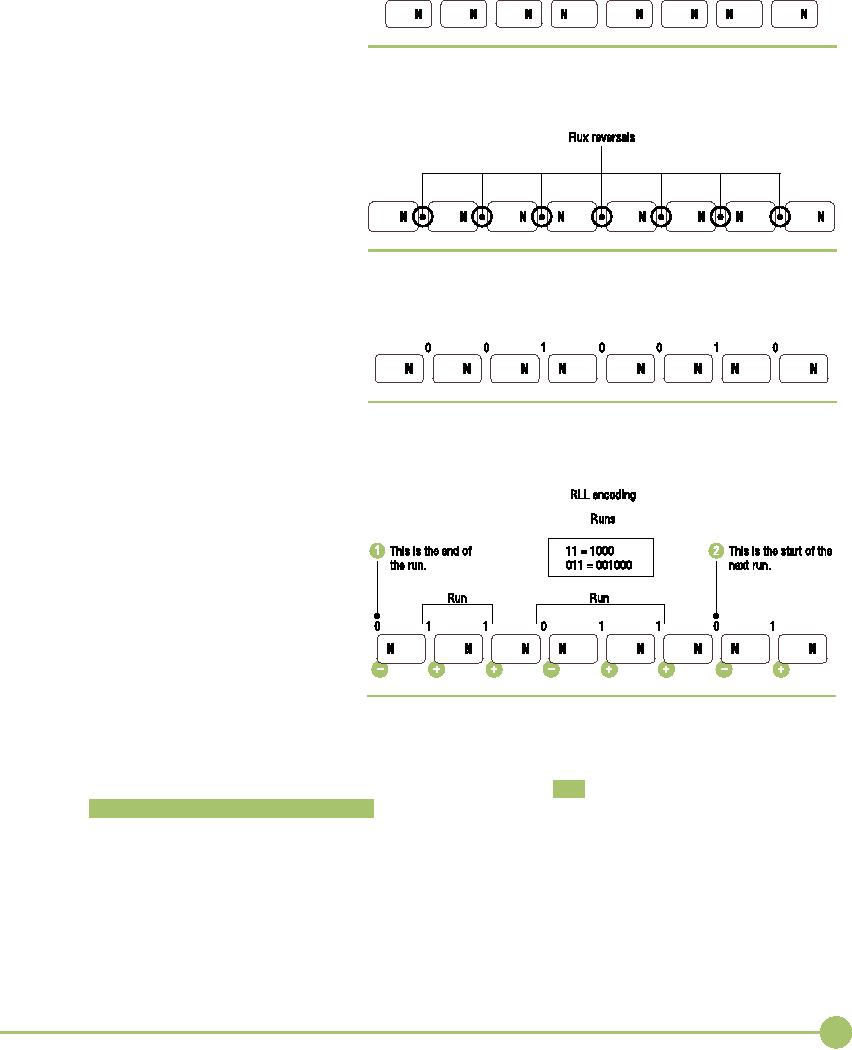
In early
hard drives, as the read/
write
head moved over a spot, the
direc-
tion of
the flux reversal defined a
one or
a zero.
As the read/write head
passed
from the
left to the right, it
recognized �
Figure
8.4 Flux
reversals
fluxes
in one direction as a zero and
the
other
direction as a one (Figure
8.5).
Hard
drives read these flux
reversals at
a very
high speed when accessing
or
writing
data.
Today's
hard drives use a
more
complex
and efficient method
to
�
Figure
8.5 Fluxes
are read in one direction as 0 and
the other direction as
1.
interpret
flux reversals using
special
data
encoding systems. Instead
of
reading
individual fluxes, a
modern
hard drive
reads groups of fluxes
called
runs.
Starting
around 1991, hard
drives
began
using a data encoding
system
known as
run
length limited (RLL).
With
RLL,
any combination of ones
and
zeroes
can be stored in a
preset
combination
of about 15 different
runs.
The hard
drive looks for these runs
and
reads
them as a group, resulting
in
much
faster and much more dense
data.
Whenever
you see RLL, you also
see
two
numbers: the minimum and
the
�
Figure
8.6 Sequential
RLL runs
maximum
run length, such as RLL
1,7
or RLL
2,7. Figure 8.6 shows
two
sequential
RLL runs.
Current
drives use an extremely
advanced method of RLL called
Par-
tial
Response Maximum Likelihood (PRML) encoding.
As hard drives pack
more and
more fluxes on the drive,
the individual fluxes start
to interact
with
each other, making it more
and more difficult for the drive to
verify
where
one flux stops and another
starts. PRML uses powerful,
intelligent
circuitry
to analyze each flux
reversal and to make a "best
guess" as to what
type of
flux reversal it just read.
As a result, the maximum run
length for
PRML
drives reaches up to around 16 to 20
fluxes, far more than the 7
or so
on RLL
drives. Longer run lengths
enable the hard drive to use
more com-
plicated
run combinations so that the hard drive
can store a
phenomenal
103
Chapter
8: Hard
Drive Technologies
amount
of data. For example, a run of
only 12 fluxes on a hard drive
might
equal a
string of 30 or 40 ones and zeroes when
handed to the system
from
the hard
drive.
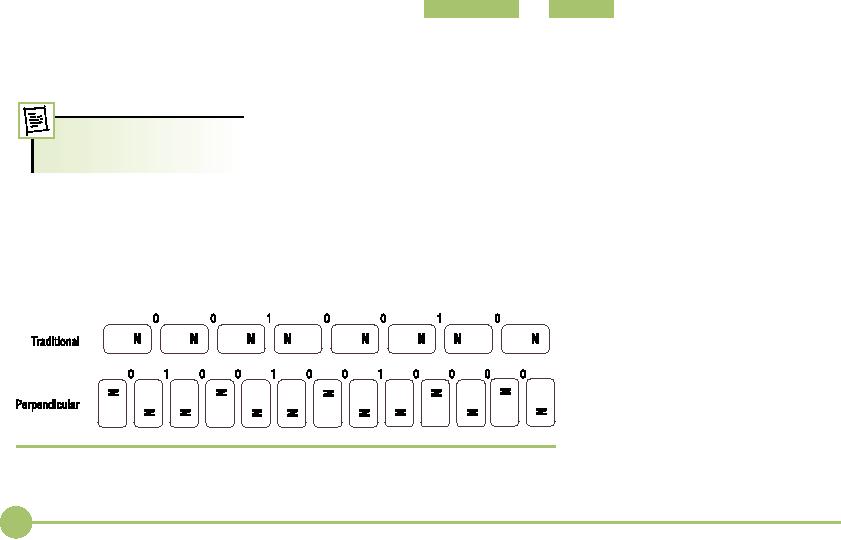
The
size required by each
magnetic flux on a hard drive has
reduced
considerably
over the years, resulting in
higher capacities. As fluxes
become
smaller,
they begin to interfere with
each other in weird ways. I
have to say
weird
since to
make sense of what's going
on at this subatomic level (I
told
you
these fluxes were small!)
would require that you take a
semester of
quantum
mechanics! Let's just say
that laying fluxes flat
against the platter
has
reached its limit. To get
around this problem, hard drive
makers re-
cently
began to make hard drives
that store their flux
reversals vertically (up
and down)
rather than longitudinally
(forward and backward),
enabling
them to
make hard drives in the 1
terabyte (1024 gigabyte)
range. Manufac-
turers
call this vertical storage
method perpendicular
recording (Figure
8.7).
For
all this discussion and
detail on data encoding, the
day-to-day PC
technician
never deals with encoding.
Sometimes, however, knowing
what
you
don't need to know helps as
much as knowing what you do need
to
know.
Fortunately, data encoding is
inherent to the hard drive and
com-
pletely
invisible to the system.
You're never going to have
to deal with data
encoding,
but you'll sure sound smart
when talking to other PC techs if
you
know your RLL from
your PRML!
Moving
the Arms
The
read/write heads move across
the platter on the ends of
actuator
arms. In
the
entire history of hard drives,
manufacturers have used only
two technol-
ogies to
move the arms: stepper
motor and voice
coil . Hard
drives first used
stepper
motor technology, but today
they've all moved to voice
coil.
Stepper
motor technology moved the arm in
fixed increments or
steps,
but the
technology had several limitations
that doomed it. Because
the inter-
face
between motor and actuator arm
required minimal slippage to
ensure
precise
and reproducible movements, the
positioning of the arms
became
less
precise over time. This
physical deterioration caused
data transfer er-
Floppy
disk drives still
use
rors.
Additionally, heat deformation
wreaked havoc with stepper
motor
stepper
motors.
drives.
Just as valve clearances in automobile
engines change with
operat-
ing
temperature, the positioning
accuracy changed as the PC
operated and
various
hard drive components got warmer.
Although very small,
these
changes
caused problems. Accessing
the data written on a cold
hard drive,
for
example, became difficult
after the disk warmed. In
addition, the read/
write
heads could damage the
disk surface if not "parked"
(set in a non-data
area)
when not in use, requiring
techs to use special parking
programs
before
transporting a step-
per
motor drive.
All hard
drives made
today
employ a linear motor
to move
the actuator arms.
The
linear motor,
more
popularly
called a voice coil
motor,
uses a permanent
magnet
surrounding a coil on
�
Figure
8.7 Perpendicular
versus traditional longitudinal recording
the
actuator arm. When an
104
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
electrical
current passes, the coil
generates a magnetic field
that moves the
Tech
Tip
actuator
arm. The direction of the
actuator arm's movement
depends on the
polarity
of the electrical current
through the coil. Because
the voice coil and
the
Fluid
Bearings
actuator
arm never touch, no
degradation in positional accuracy
takes place
Currently,
almost all hard drives
over
time. Voice coil drives
automatically park the heads
when the drive loses
use a
motor located in the
center
power,
making the old stepper
motor park programs
obsolete.
spindle
supporting the drive
plat-
ters.
Traditionally, tiny ball
bear-
Lacking
the discrete "steps" of the
stepper motor drive, a voice
coil drive
ings
support the spindle
motor,
cannot
accurately predict the
movement of the heads across
the disk. To
and as
disk technology has
ad-
make
sure voice coil drives
land exactly in the correct
area, the drive re-
vanced,
these ball bearings
have
serves
one side of one platter for
navigational purposes. This
area essen-
become
the limiting factor in
the
tially
"maps" the exact location of
the data on the drive.
The voice coil
three
critical design criteria
for
moves
the read/write head to its
best guess about the
correct position on
the
hard drives:
rotational speed,
hard
drive. The read/write head
then uses this map to
fine-tune its true
po-
storage
capacity, and noise
levels.
sition
and make any necessary
adjustments.
The
higher the rotational speed
of
Now that
you have a basic understanding of how a
drive physically
a
drive, the more the
metal-on-
stores
data, let's turn to how the hard drive
organizes that data so we
can
metal
contact creates heat and
lu-
use
that drive.
bricant
problems that impact
the
lifespan
of the bearings.
However
precisely
machined, ball
bearings
Geometry
are
not perfectly round. The
mea-
surement
of how much they
wob-
Have you
ever seen a cassette tape?
If you look at the actual brown
Mylar (a
ble
(and thus how much the
drive
type of
plastic) tape, nothing will
tell you whether sound is
recorded on that
platters
wobble), called runout,
is
tape.
Assuming the tape is not
blank, however, you know something
is
on the
now
the limiting factor on
how
tape.
Cassettes store music in
distinct magnetized lines. You
could say that
densely
you can pack
information
the
physical placement of those
lines of magnetism is the
tape's "geometry."
together
on a disk drive.
Geometry
also
determines where a hard drive stores
data. As with a cas-
The
technological fix for
this
sette
tape, if you opened up a hard drive, you
would not see the
geometry.
comes
in the form of fluid
bear-
But
rest assured that the drive
has geometry; in fact, every
model of hard
ings. A
fluid bearing is
basically
a small
amount of lubricant
drive
uses a different geometry. We
describe the geometry for a
particular
trapped
in a carefully machined
hard drive with a
set of numbers representing
three values: heads,
cylin-
housing.
The use of fluid in
place
ders,
and sectors per
track.
of
metal balls means that no
con-
tact
occurs between metal
sur-
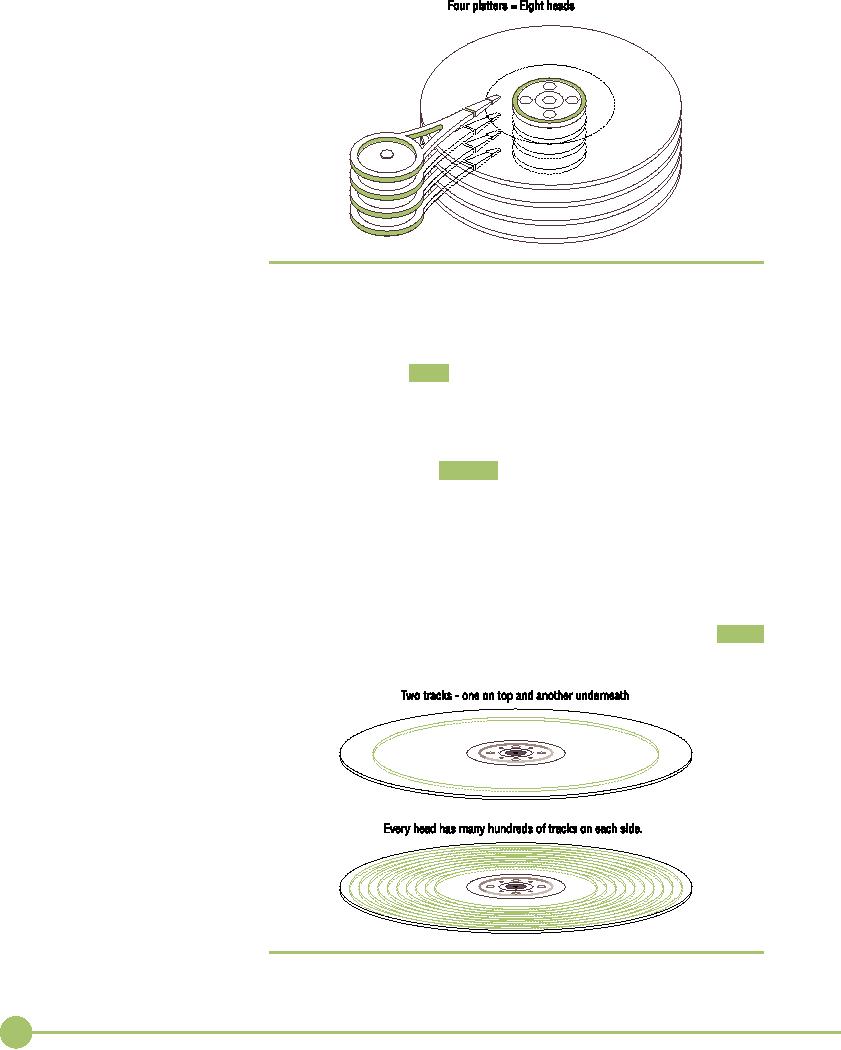
Heads
faces
to generate heat and
wear.
The
number of heads
for a
specific hard drive describes, rather
logically, the
The
fluid also creates no
mechani-
number
of read/write heads used by
the drive to store data.
Every platter
cal
vibration, so fluid
bearings
can
support higher rotational
requires
two heads. If a hard drive has four
platters, for example, it would
speeds.
The runout of a
fluid
need
eight heads (see Figure
8.8).
bearing
is about one-tenth that of
Based on
this description of heads, you would
think that hard
drives
the
best ball bearing,
significantly
would
always have an even number
of heads, right? Wrong! Most
hard
increasing
potential information
drives
reserve a head or two for their own
use. Therefore, a hard drive
can
density.
The absence of a
mechan-
have
either an even or an odd number of
heads.
ical
connection between moving
parts
also dramatically
reduces
Cylinders
noise
levels, and the fluid
itself
acts to
dampen the sound
further.
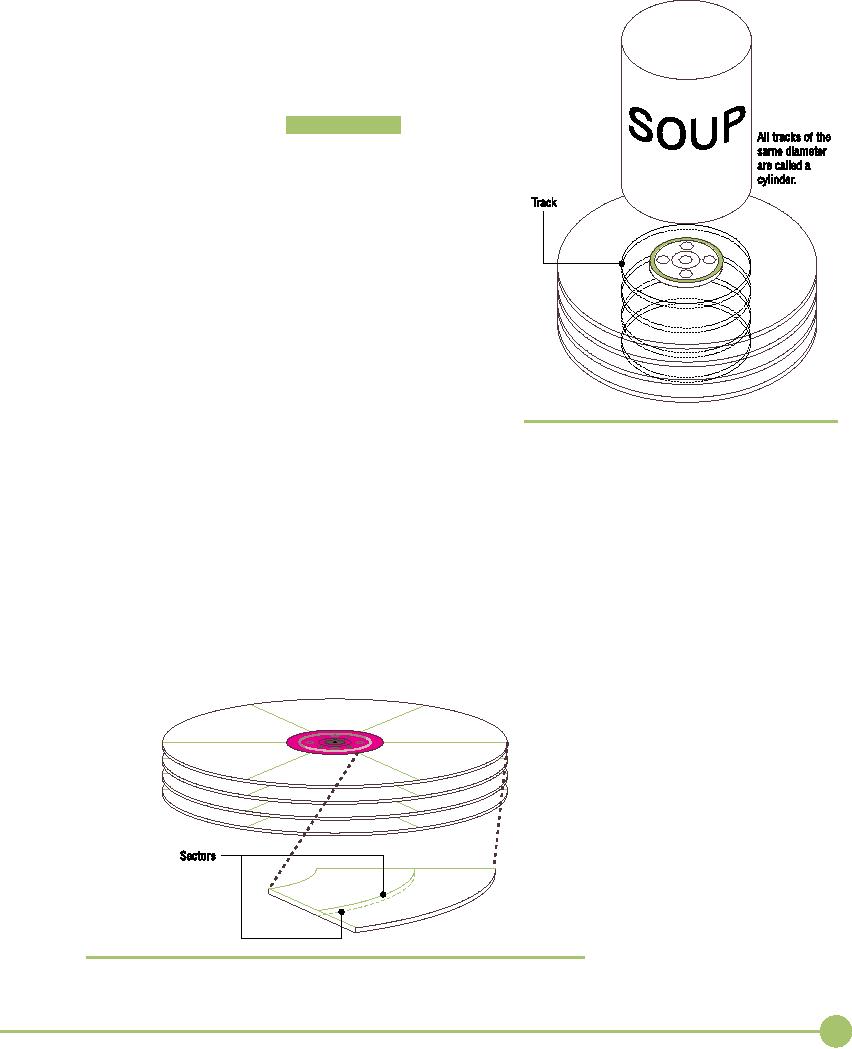
To
visualize cylinders, imagine
taking a soup can and
opening both ends of
Finally,
liquid bearings provide
the
can. Wash off the label and
clean out the inside. Now
look at the shape of
better
shock resistance than
ball
the
can; it is a geometric shape
called a cylinder. Now imagine
taking that
bearings.
cylinder
and sharpening one end so
that it easily cuts through
the hardest
metal.
Visualize placing the
ex-soup can over the hard drive and
pushing it
down
through the drive. The
can cuts into one
side and out the other
of
105
Chapter
8: Hard
Drive Technologies
�
Figure
8.8
Two
heads per platter
each
platter. Each circle
transcribed by the can is
where you store data on
the
drive,
and is called a track
(Figure
8.9).
Each
side of each platter
contains tens of thousands of
tracks. Interest-
ingly
enough, the individual
tracks themselves are not
directly part of the
drive
geometry. Our interest lies
only in the groups of tracks
of the same di-
ameter,
going all of the way through
the drive. Each group of
tracks of the
same
diameter is called a cylinder
(see
Figure 8.10).
There's
more than one cylinder! Go
get yourself about a
thousand more
cans,
each one a different
diameter, and push them
through the hard
drive.
A
typical hard drive contains thousands of
cylinders.
Sectors
per Track
Now
imagine cutting the hard drive
like a birthday cake,
slicing all the
tracks
into tens of thousands of
small slivers. Each sliver
is called a sector,
and each
sector stores 512 bytes of
data (see Figure 8.11).
Note that sector
�
Figure
8.9
Tracks
106
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
refers
to the sliver when discussing
geometry, but it refers to
the
specific
spot on a single track within
that sliver when
discussing
data
capacity.
The
sector is the universal
"atom" of all hard drives.
You
can't
divide data into anything
smaller than a sector.
Although
sectors
are important, the number of
sectors is not a
geometry.
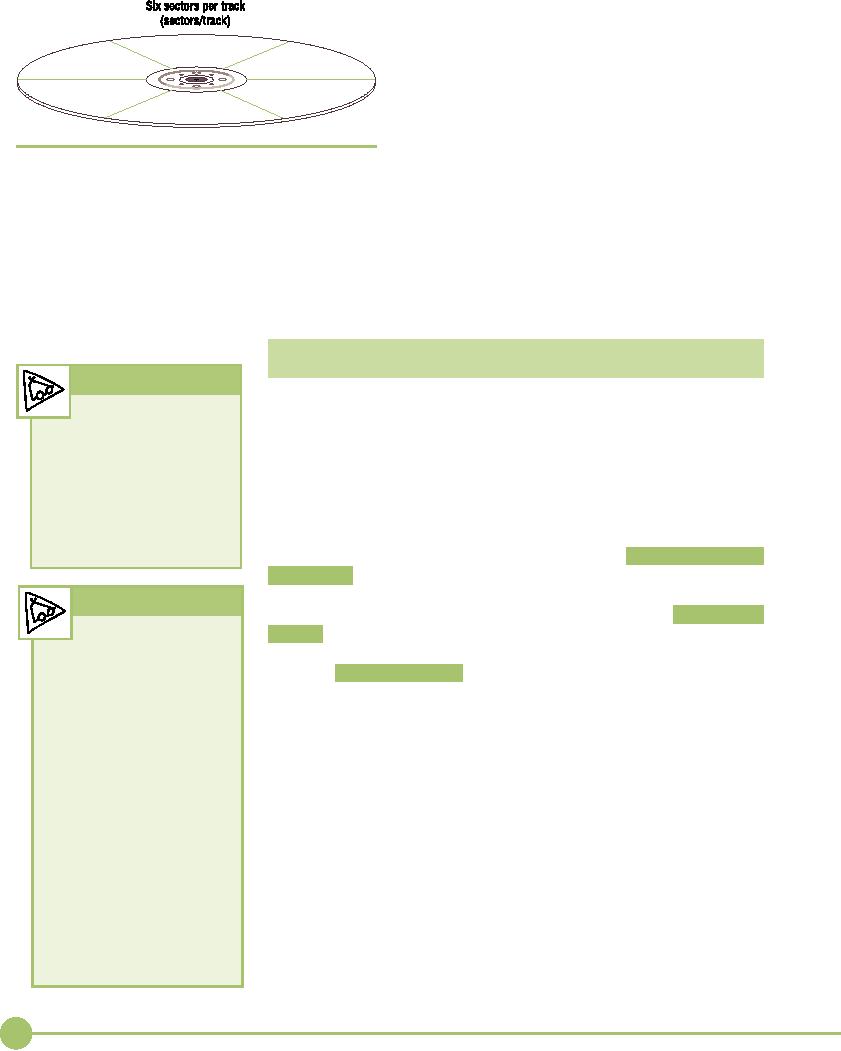
The
geometry value is called sectors
per track (sectors/track).
The
sectors/track value describes
the number of sectors in
each
track
(see Figure 8.12).
The
Big Three
Cylinders,
heads, and sectors/track combine to
define the hard
drive's
geometry. In most cases,
these three critical values
are
referred
to as CHS.
The
importance of these three
values lies in
the
fact that the PC's
BIOS needs to know the
drive's geometry
to know how to
talk to the drive. Back in
the old days, a
techni-
cian
needed to enter these values
into the CMOS setup
program
manually.
Today, every hard drive stores
the CHS information
in the
drive itself, in an electronic format
that enables the
BIOS
to query
the drive automatically to determine
these values.
You'll
see more on this later in
the chapter in the section
called
"Autodetection."
Two
other values--write precompensation
cylinder and �
Figure
8.10
Cylinder
landing
zone--no longer have
relevance in today's PCs;
how-
ever,
these terms still are
tossed around and a few CMOS
setup
utilities
still support them--another
classic example of a technology
appen-
dix!
Let's look at these two
holdouts from another era so when you
access
CMOS,
you won't say, "What the
heck are these?"
Write
Precompensation Cylinder
Older
hard drives had a real problem with
the fact that sectors
toward the
inside
of the drives were much
smaller than sectors toward
the outside. To
handle
this, an older drive would spread
data a little farther apart
once it got
to a
particular cylinder. This
cylinder was called the
write precompensation
�
Figure
8.11
Sectors
107
Chapter
8: Hard
Drive Technologies
(write
precomp) cylinder, and the PC had to
know
which
cylinder began this wider
data spacing. Hard
drives
no longer have this problem,
making the write
precomp
setting obsolete.
Landing
Zone
On older
hard drives with stepper motors,
the landing
zone
value designated an unused
cylinder as a "parking
�
Figure
8.12
place"
for the read/write heads. As
mentioned earlier,
Sectors
per track
old
stepper motor hard drives
needed to have their
read/write
heads parked before being
moved in order to
avoid
accidental damage. Today's
voice coil drives
park
themselves
whenever they're not
accessing data, automatically
placing the
read/write
heads on the landing zone.
As a result, the BIOS no
longer needs
the
landing zone
geometry.
IT
Technician
Tech
Tip
IDE
ATA--The
King
■
The
term IDE
(integrated
drive
electronics)
refers to any hard
Over the
years, many interfaces
existed for hard drives, with such
names as
drive
with a built-in
controller.
ST-506
and ESDI. Don't worry about what these
abbreviations stood
for;
All
hard drives are technically
neither
the CompTIA A+ certification exams nor
the computer world at
IDE
drives, although we only use
large
has an interest in these
prehistoric interfaces. Starting
around 1990, an
the
term IDE when discussing
interface
called ATA appeared that now
virtually monopolizes the
hard
ATA
drives.
drive
market. ATA hard drives are
often referred to as integrated drive
elec-
tronics
(IDE) drives.
Only one other type of
interface, the moderately
popu-
lar
small computer system
interface (SCSI), has any
relevance for hard
Tech
Tip
drives.
ATA drives come in two basic
flavors. The older parallel
ATA
(PATA)
drives
send data in parallel, on a
40- or 80-wire data cable.
PATA
External
Hard Drives
drives
dominated the industry for
more than a decade but are
being re-
A quick
trip to any major
com-
placed
by serial
ATA (SATA) drives
that send data in serial,
using only one
puter
store will reveal a
thriving
wire for
data transfers. The leap
from PATA to SATA is only one of a
large
trade in external
hard drives. You
used to
be able to find external
number
of changes that have taken
place over the years with
ATA. To appre-
drives
that connected to the
slow
ciate
these changes, we'll run
through the many ATA
standards forwarded
parallel
port, but external drives
over the
years.
today
connect to a FireWire,
Hi-Speed
USB 2.0, or eSATA
ATA-1
port.
All three interfaces
offer
high
data transfer rates
and
When IBM
unveiled the 80286-powered IBM PC AT in
the early 1980s, it
in-
hot-swap capability,
making them
troduced
the first PC to include BIOS
support for hard drives. This
BIOS
ideal
for transporting huge
files
supported
up to two physical drives, and
each drive could be up to 504
MB--
such as
digital video clips.
Re-
far
larger than the 5-MB and
10-MB drives of the time.
Although having
gardless
of the external interface,
however,
inside the casing
you'll
built-in
support for hard drives certainly
improved the power of the
PC, at
find an
ordinary PATA or
SATA
that
time, installing, configuring, and
troubleshooting hard drives could
at
drive,
just like those described
in
best be
called difficult.
this
chapter.
To
address these problems,
Western Digital and Compaq
developed a
new hard drive
interface and placed this
specification before the American
108
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
National
Standards Institute (ANSI)
committees,
which in turn put out the AT
Attachment
(ATA) interface
in March of 1989. The ATA
interface specified a
The ANSI
subcommittee di-
cable
and a built-in controller on the drive
itself. Most importantly,
the ATA
rectly
responsible for the
ATA
standard
is called Technical
standard
used the existing AT BIOS on
a PC, which meant that you
didn't
Committee
T13. If you want to
have to
replace the old system BIOS
to make the drive work--a very
impor-
know
what's happening with
tant
consideration for compatibility but one
that would later haunt
ATA
ATA,
check out the T13 Web
site:
drives.
The official name for the
standard, ATA, never made it
into the com-
www.t13.org.
mon
vernacular until recently, and
then only as PATA to distinguish it
from
SATA
drives.
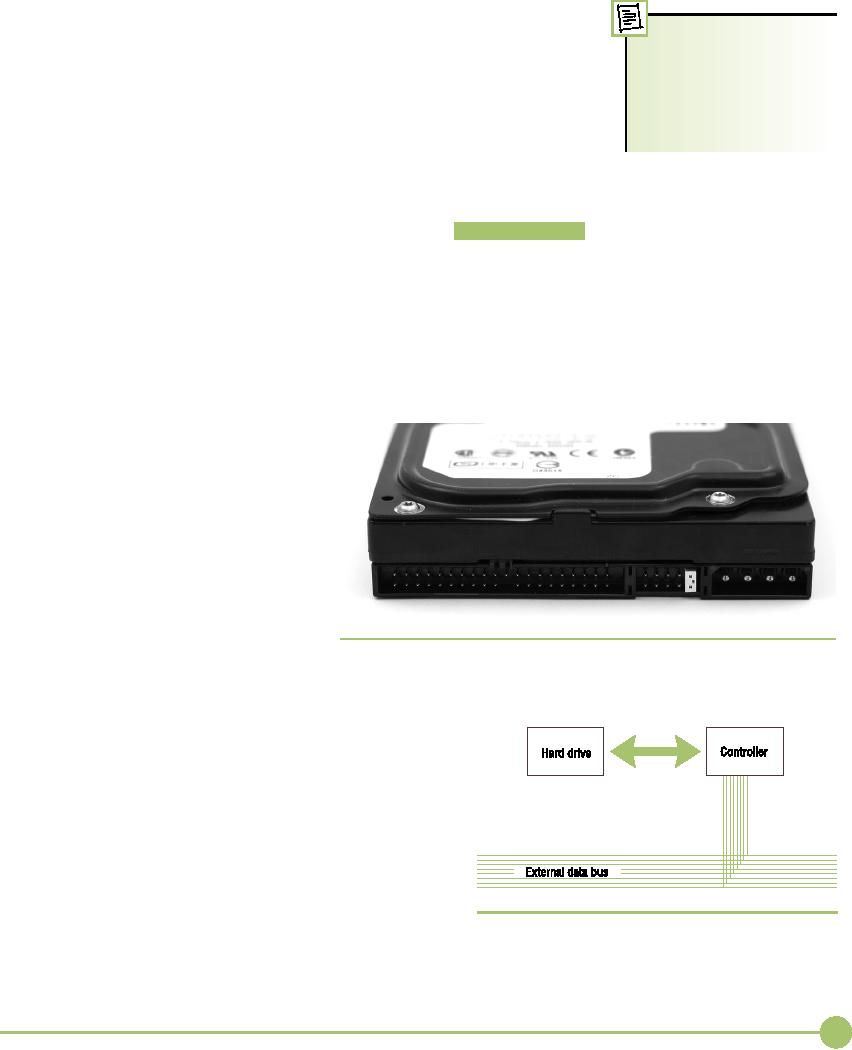
Early
ATA Physical
Connections
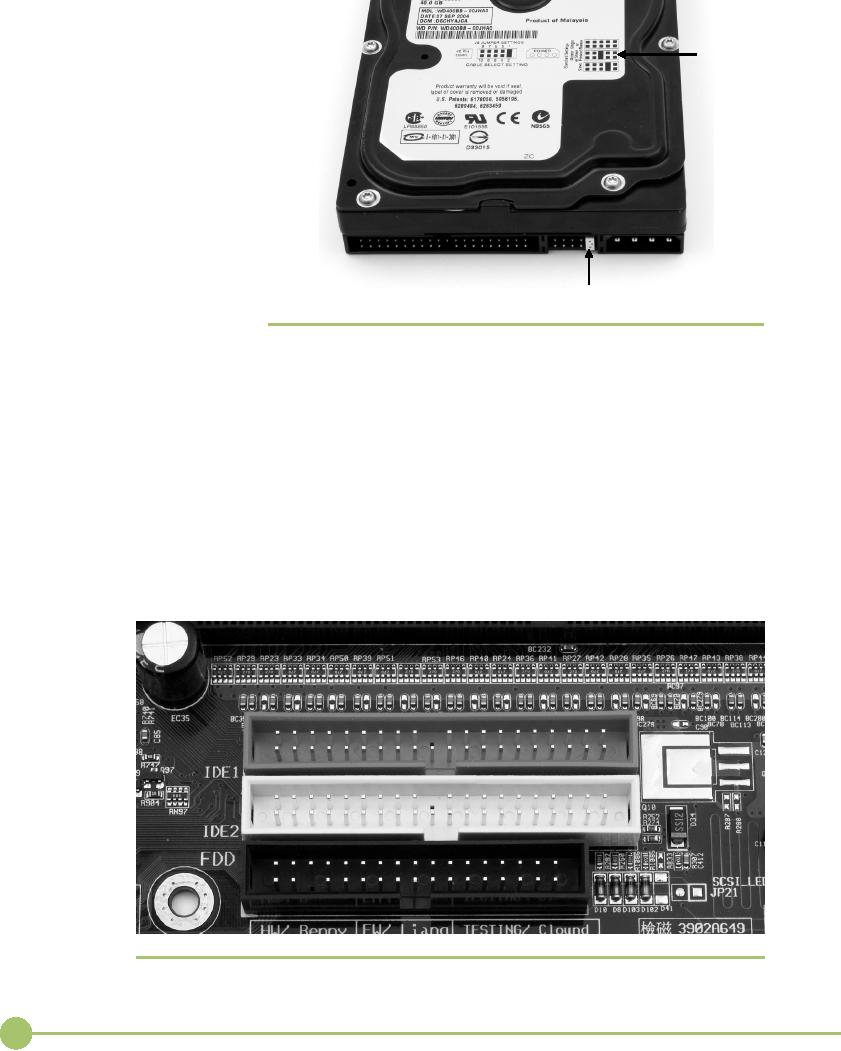
The
first ATA drives connected to
the computer with a 40-pin
ribbon cable
that
plugged into the drive and to a hard
drive controller. The cable
has a
colored
stripe down one side that
denotes pin 1 and should connect to
the
drive's
pin 1 and to the controller's pin 1.
Figure 8.13 shows the
"business
end" of an
early ATA drive, with the
connectors for the ribbon
cable and the
power
cable.
The
controller is the support
circuitry that acts as the
intermediary be-
tween
the hard drive and the external
data bus. Electronically,
the setup
looks
like Figure 8.14.
Wait a
minute! If ATA drives
are IDE
(see the Tech Tip),
they al-
ready
have a built-in
controller.
Why do
they then have to plug
into
a controller
on
the motherboard?
Well,
this is a great example of
a
term
that's not used properly,
but
everyone
(including the
mother-
board
and hard drive makers) uses
it this
way. What we call the
ATA
controller
is really no more than
an
interface
providing a connection to
the
rest of the PC system.
When
your
BIOS talks to the hard
drive, it �
Figure
8.13 Back
of IDE drive showing 40-pin
connector (left), jumpers (center),
and
actually
talks to the onboard
cir-
power
connector (right)
cuitry
on the drive, not the
connec-
tion on
the motherboard. But,
even
though
the real
controller
resides on the hard drive,
the
40-pin
connection on the motherboard is
called the con-
troller.
We have a lot of misnomers to live with
in the
ATA
world!
The
ATA-1 standard defined that no
more than two
drives
attach to a single IDE connector on a
single ribbon
cable.
Because up to two drives can
attach to one connec-
tor via
a single cable, you need to be
able to identify each
drive on
the cable. The ATA standard
identifies the two
different
drives as "master" and "slave." You
set one
drive as
master and one as slave
using tiny jumpers on �
Figure
8.14 Relation
of drive, controller, and
bus
the
drives (Figure 8.15).
109
Chapter
8: Hard
Drive Technologies
Directions
Jumper
�
Figure
8.15
A
typical hard drive with directions
for setting a jumper
The
controllers are on the
motherboard and manifest themselves as
two
40-pin
male ports, as shown in
Figure 8.16.
PIO
and DMA Modes
If
you're making a hard drive standard, you
must define both the
method
and the
speed at which the data's
going to move. ATA-1 defined two
differ-
ent
methods, the first using
programmed I/O (PIO) addressing and
the sec-
ond
using direct memory access
(DMA) mode.
�
Figure
8.16
IDE
interfaces on a motherboard
110
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)

PIO is
nothing more than the
traditional I/O addressing scheme,
where
the CPU
talks directly to the hard drive via
the BIOS to send and
receive
data.
Three different PIO speeds
called PIO
modes were
initially adopted:
PIO
mode 0: 3.3 MBps (megabytes
per second)
■
PIO
mode 1: 5.2 MBps
■
PIO
mode 2: 8.3 MBps
■
DMA modes
defined
a method to enable the hard
drives to talk to RAM
directly
using old-style DMA commands.
(The ATA folks called this
single
word
DMA.) This
old-style DMA was slow, and
the resulting three ATA
sin-
gle word
DMA modes were also
slow:
Single
word DMA mode 0: 2.1
MBps
■
Single
word DMA mode 1: 4.2
MBps
■
Single
word DMA mode 2: 8.3
MBps
■
When a
computer booted up, the
BIOS queried the hard drive to
see
what
modes it could use and would
then automatically adjust to
the fastest
mode.
ATA-2
In 1990,
the industry adopted a
series of improvements to the ATA
standard
called
ATA-2. Many people called
these new features Enhanced
IDE (EIDE) .
The
terms ATA, IDE, and EIDE
EIDE
was really no more than a
marketing term invented by
Western Digi-
are
used interchangeably.
tal, but
it caught on in common vernacular and is
still used today,
although
its
use is fading. Regular IDE
drives quickly disappeared, and by
1995, EIDE
drives
dominated the PC world.
Figure 8.17 shows a typical
EIDE drive.
�
Figure
8.17
EIDE
drive
111
Chapter
8: Hard
Drive Technologies
ATA-2
was the most important ATA
standard, as it included
powerful
new
features such as higher
capacities; support for nonhard
drive storage
devices;
support for two more ATA devices, for a
maximum of four; and
substantially
improved throughput.
Higher
Capacity with LBA
IBM
created the AT BIOS to
support hard drives many
years before IDE
Hard
drive makers talk
about
drives
were invented, and every
system had that BIOS. The
developers of
hard
drive capacities in
millions
IDE made
certain that the new drives
would run from the same AT
BIOS
and
billions of bytes, not
mega-
command
set. With this capability, you
could use the same
CMOS and BIOS
bytes
and gigabytes!
routines
to talk to a much more
advanced drive. Your
motherboard or hard
drive
controller wouldn't become instantly
obsolete when you installed a
new hard
drive.
Unfortunately,
the BIOS routines for the
original AT command set
allowed
a hard
drive size of only up to 528
million bytes (or 504
MB--remember that a
mega =
1,048,576, not 1,000,000). A drive
could have no more than
1024 cyl-
inders,
16 heads, and 63 sectors/track:
1024
cylinders � 16 heads � 63 sectors/track �
512 bytes/sector = 504
MB
For
years, this was not a
problem. But when hard drives
began to ap-
proach
the 504 MB barrier, it
became clear that there
needed to be a way of
getting
past 504 MB. The ATA-2
standard defined a way to get
past this limit
with logical
block addressing (LBA) . With
LBA, the hard drive lies to
the
computer
about its geometry through
an advanced type of sector
transla-
tion.
Let's take a moment to
understand sector
transla-
tion,
and then come back to
LBA.
Sector
Translation Long
before hard drives
approached
the
504 MB limit, the limits of
1024 cylinders, 16
heads,
and 63
sectors/track gave hard drive makers
fits. The
big
problem was the heads.
Remember that every
two
heads
means another platter,
another physical disk
that
you have
to squeeze into a hard drive. If you
wanted a
hard drive with
the maximum number of 16
heads, you
would
need a hard drive with eight physical
platters
inside
the drive! Nobody wanted
that many platters:
it
made
the drives too tall, it
took more power to spin
up
the
drive, and that many parts
cost too much money
(see
Figure
8.18).
�
Figure
8.18
Too
many heads
Manufacturers
could readily produce a hard
drive
that had
fewer heads and more
cylinders, but the
stupid
1024/16/63
limit got in the way.
Plus, the traditional
sector
arrangement wasted a lot of
useful space. Sectors
toward
the inside of the drive, for
example, are much
shorter
than the sectors on the
outside. The sectors on
the
outside
don't need to be that long,
but with the tradi-
tional
geometry setup, hard drive makers had no
choice.
They
could make a hard drive store a
lot more informa-
tion,
however, if hard drives could be
made with more
�
Figure
8.19
Multiple
sectors/track
sectors/track
on the outside tracks (see
Figure 8.19).
112
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
The ATA
specification was designed to
have two geometries. The physi-
cal
geometry defined
the real layout of the
CHS inside the drive.
The logical
geometry
described
what the drive told the
CMOS. In other words, the
IDE
drive
"lied" to the CMOS, thus
side-stepping the artificial
limits of the BIOS.
When
data was being transferred
to and from the drive, the
onboard cir-
cuitry
of the drive translated the
logical geometry into the
physical geome-
try.
This function was, and still
is, called sector
translation .
Let's
look at a couple of hypothetical
examples in action. First,
pretend
that
Seagate came out with a
new,
cheap,
fast hard drive called
the
ST108.
To get the ST108 drive
fast
Table
8.1
Seagate's
ST108 Drive Geometry
and
cheap, however, Seagate
had
ST108
Physical
BIOS
Limits
to use a
rather strange
geometry,
shown in
Table 8.1.
Cylinders
2048
Cylinders
1024
Notice
that the cylinder
num-
Heads
2
Heads
16
ber is
greater than 1024. To
over-
come
this problem, the IDE
drive
Sectors/Track
52
Sectors/Track
63
performs
a sector translation
that
Total
Capacity
108
MB
reports
a geometry to the BIOS
that
is
totally different from the
true ge-
ometry
of the drive. Table
8.2
Table
8.2
Physical and
Logical Geometry of the ST108
Drive
shows
the actual geometry and
the
"logical"
geometry of our mythical
Physical
Logical
ST108
drive. Notice that the
logical
Cylinders
2048
Cylinders
512
geometry
is now within the
accept-
able
parameters of the BIOS
limita-
Heads
2
Heads
8
tions.
Sector translation
never
Sectors/Track
52
Sectors/Track
52
changes
the capacity of the drive;
it
changes
only the geometry to
stay
Total
Capacity
108
MB
Total
Capacity
108
MB
within
the BIOS limits.
Back to
LBA Now
let's watch how the advanced
sector translation of LBA
provides
support for hard drives
greater than 504 MB.
Let's use an old
drive,
the
Western Digital WD2160, a
2.1-GB hard drive, as an
example. This drive is
no
longer in production but its
smaller CHS values make
understanding LBA
easier.
Table 8.3 lists its
physical and logical
geometries.
Note
that, even with sector
translation, the number of
heads is greater than
the
allowed 16! So here's where
the magic of LBA comes in.
The WD2160 is ca-
pable of
LBA. Now assuming that the
BIOS is also capable of LBA,
here's
what
happens. When the
com-
puter
boots up, the BIOS asks
the
Table
8.3
Western
Digital WD2160's Physical
drives
if they can perform LBA.
If
and
Logical Geometries
they
say yes, the BIOS and
the
Physical
Logical
drive
work together to change
the
way they
talk to each other.
They
Cylinders
16,384
Cylinders
1024
can do
this without
conflicting
Heads
4
Heads
64
with the
original AT BIOS com-
mands by
taking advantage of
un-
Sectors/Track
63
Sectors/Track
63
used
commands to use up to
256
Total
Capacity
2.1
GB
Total
Capacity
2.1
GB
heads.
LBA enables support for a
113
Chapter
8: Hard
Drive Technologies
maximum
of 1024 � 256 � 63 � 512
bytes = 8.4-GB hard drives.
Back in 1990, 8.4
GB was
hundreds of time larger than
the drives used at the
time. Don't worry,
later
ATA standards will get the
BIOS up to today's huge
drives!
Not
Just Hard Drives Anymore:
ATAPI
ATA-2
added an extension to the ATA
specification, called Advanced
Tech-
With
the introduction of
ATAPI,
the ATA standards are
nology
Attachment Packet Interface (ATAPI)
, that
enabled nonhard drive
often
referred to as ATA/ATAPI
devices
such as CD-ROM drives and tape
backups to connect to the PC
via
instead
of just ATA.
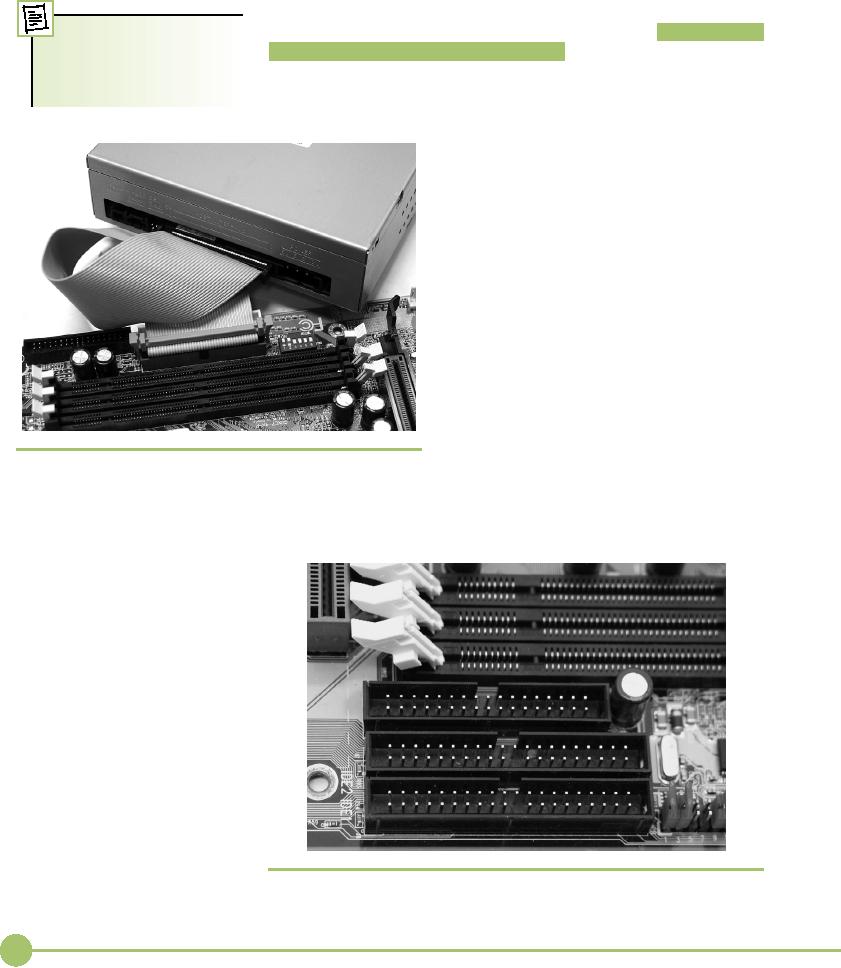
the ATA
controllers. ATAPI drives have
the same 40-pin interface
and mas-
ter/slave
jumpers as ATA hard drives. Figure
8.20 shows an ATAPI
CD-RW
drive attached to a motherboard. The
key
difference
between hard drives and every
other
type of
drive that attaches to the ATA
controller is
in how
the drives get BIOS
support. Hard drives
get it
through the system BIOS,
whereas nonhard
drives
require the operating system
to load a
software
driver.
More
Drives with ATA-2
ATA-2
added support for a second
controller,
raising
the total number of
supported drives from
two to
four. Each of the two
controllers is equal in
power and
capability. Figure 8.21 is a
close-up of
a
typical motherboard, showing
the primary con-
troller
marked as IDE1
and
the secondary marked
as IDE2.
Increased
Speed
�
Figure
8.20
ATAPI
CD-RW drive attached to a
motherboard via a
standard,
40-pin ribbon cable
ATA-2
defined two new PIO modes and a
new
type of
DMA called multi-word
DMA that
was a
substantial
improvement over the old DMA.
�
Figure
8.21
Primary
and secondary controllers labeled on a
motherboard
114
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
Technically,
multi-word DMA was still the
old-style DMA, but it worked in
a much
more efficient manner so it
was much faster.
PIO
mode 3: 11.1 MBps
■
PIO
mode 4: 16.6 MBps
■
Multi-word
DMA mode 0: 4.2 MBps
■
Multi-word
DMA mode 1: 13.3 MBps
■
Multi-word
DMA mode 2: 16.6 MBps
■
ATA-3
ATA-3
came on quickly after ATA-2 and
added
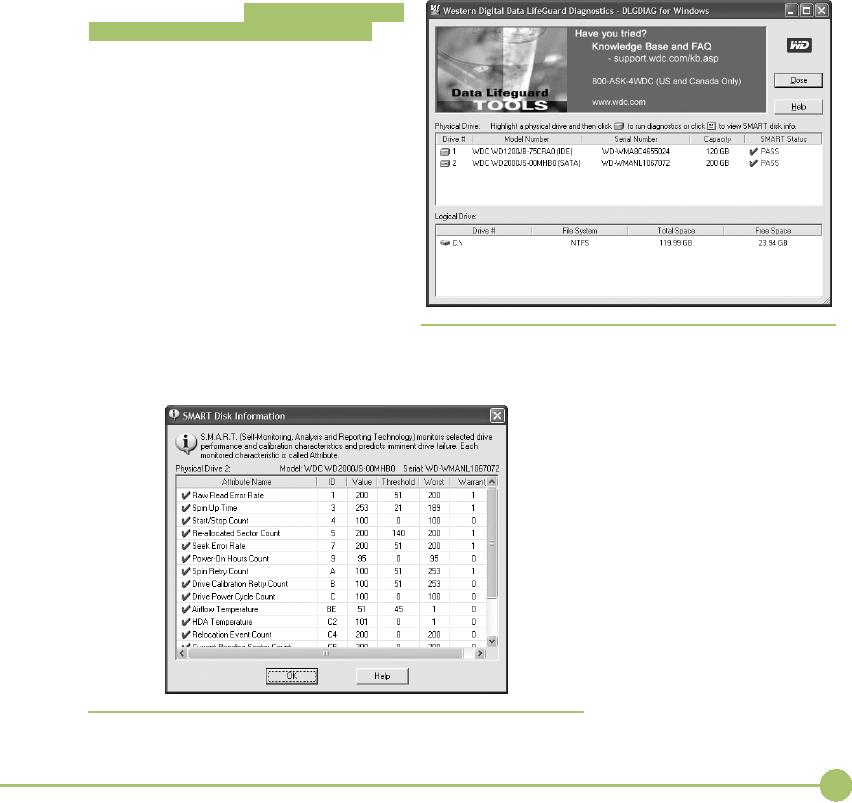
one new
feature called Self-Monitoring,
Analy-
sis,
and Reporting Technology
(S.M.A.R.T. ,
one
of the
few PC acronyms that requires
the use of
periods
after each letter).
S.M.A.R.T. helps pre-
dict
when a hard drive is going to fail by
moni-
toring
the hard drive's mechanical
components.
S.M.A.R.T.
is a great idea and is
popular in
specialized
server systems, but it's
complex, im-
perfect,
and hard to understand. As a
result, only
a few
utilities can read the
S.M.A.R.T. data on
your
hard drive. Your best
sources are the
hard
drive
manufacturers. Every hard drive
maker
has a
free diagnostic tool (that
usually works
only for
their drives) that will do a
S.M.A.R.T.
check
along with other tests. Figure
8.22 shows
Western
Digital's Data Lifeguard
Tool in action.
Note
that it says only whether
the drive has
passed
or not. Figure 8.23 shows
some S.M.A.R.T.
�
Figure
8.22
Data
Lifeguard
information.
�
Figure
8.23
S.M.A.R.T.
information
115
Chapter
8: Hard
Drive Technologies
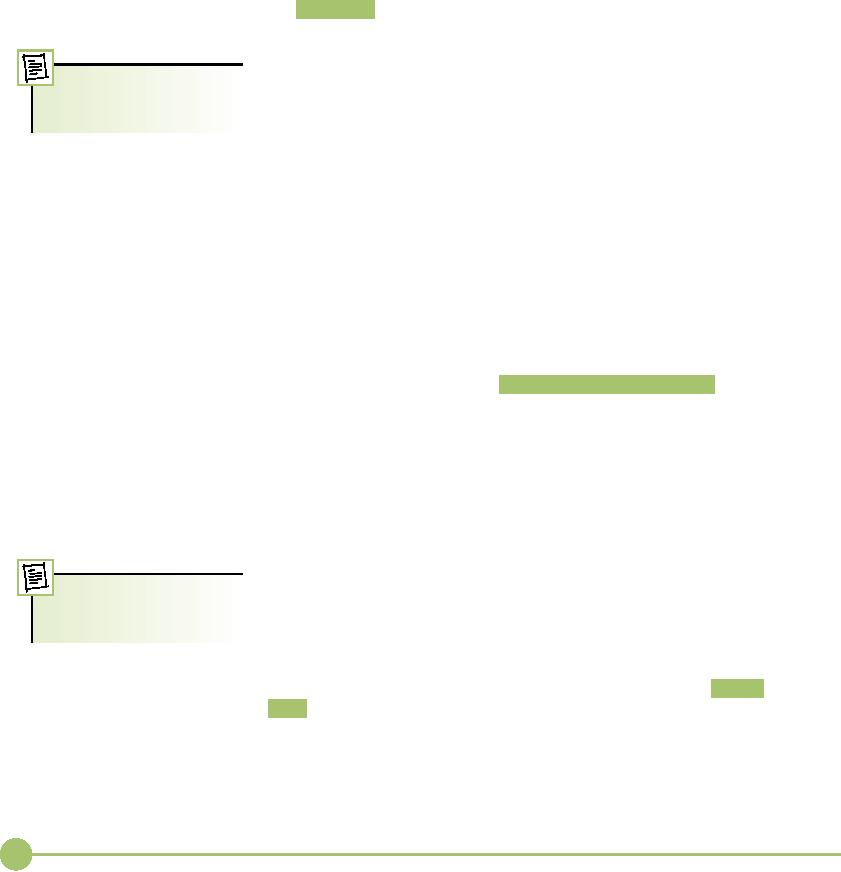
Although
you can see the actual
S.M.A.R.T. data, it's
generally useless or
indecipherable.
It's best to trust the
manufacturer's opinion and run
the
software
provided.
ATA-4
Anyone
who has opened a big
database file on a hard drive appreciates
that
a faster
hard drive is better. ATA-4 introduced a new DMA
mode called
Ultra
DMA that is now the primary way a hard
drive communicates with a
PC.
Ultra DMA
uses DMA
bus mastering to achieve far
faster speeds than
was
possible with PIO or old-style DMA. ATA-4
defined three Ultra
DMA
modes:
Ultra
DMA mode 0: 16.7 MBps
■
Ultra
DMA mode 2, the most
popular
of the ATA-4 DMA
Ultra
DMA mode 1: 25.0 MBps
■
modes,
is also called
ATA/33.
Ultra
DMA mode 2: 33.3 MBps
■
INT13
Extensions
Here's
an interesting factoid for you:
The original ATA-1 standard
allowed
for hard
drives up to 137 GB! It
wasn't the ATA standard that
caused the
504-MB
size limit, it was the
fact that the standard
used the old AT BIOS
and
the
BIOS, not the ATA standard,
could support only 504
MB. LBA was a
work-around
that told the hard drive to
lie to the BIOS to get it up
to 8.4 GB.
But
eventually hard drives started
edging close to the LBA
limit and some-
thing
had to be done. The T13
folks said, "This isn't
our
problem!
It's the an-
cient
BIOS problem. You BIOS
makers need to fix the
BIOS!" And they did.
In 1994,
Phoenix Technologies (the
BIOS manufacturer) came up with
a
new set
of BIOS commands called Interrupt
13 (INT13) extensions .
INT13
extensions
broke the 8.4-GB barrier by
completely ignoring the CHS
values
and
instead feeding the LBA a
stream of addressable sectors. A
system with
INT13
extensions can handle drives
up to 137 GB. The entire PC
industry
quickly
adopted INT13 extensions and every
system made since
20002001
supports
INT13 extensions.
ATA-5
Ultra
DMA was such a huge hit
that the ATA folks adopted
two faster Ultra
DMA
modes with ATA-5:
Ultra
DMA mode 4, the most
popular
of the ATA-5 DMA
Ultra
DMA mode 3: 44.4 MBps
■
modes,
is also called
ATA/66.
Ultra
DMA mode 4: 66.6 MBps
■
Ultra
DMA modes 4 and 5 ran so quickly
that the ATA-5 standard
de-
fined a
new type of ribbon cable of
handling the higher speeds.
This 80-wire
cable
still
has 40 pins on the
connectors, but it includes another 40
wires
in the
cable that act as grounds to
improve the cable's ability
to handle
high-speed
signals. The 80-wire cable,
just like the 40-pin
ribbon cable, has a
colored
stripe down one side give you
proper orientation for pin 1 on
the
116
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
controller
and the hard drive. Previous
ver-
sions of
ATA didn't define where the
differ-
ent
drives were plugged into
the ribbon
cable,
but ATA-5 defined exactly where
the
controller,
master, and slave drives
con-
nected,
even defining colors to
identify
them.
Take a look at the ATA/66
cable in
Figure
8.24. The connector on the
left is col-
ored
blue (which you could see if
the photo
was in
color!)--that connector must be
the
one
used to plug into the
controller. The
connector
in the middle is grey--that's
for
the
slave drive. The connector
on the right is �
Figure
8.24 ATA/66
cable
black--that's
for the master drive.
Any
ATA/66
controller connections are
colored
blue to
let you know it is an ATA/66
controller.
ATA/66 is
backward compatible, so you may
safely plug an earlier
drive
into an ATA/66 cable and controller. If
you plug an ATA/66 drive
into an
older controller it will work⎯just
not in ATA/66 mode. The
only
risky
action is to use an ATA/66 controller and
hard drive with a non-ATA/
66
cable. Doing so will almost
certainly cause nasty data
losses!
ATA-6
Hard drive
size exploded in the early
21st century and the
seemingly
impossible-to-fill
137-GB limit created by INT13
extensions became a
bar-
rier to
fine computing more quickly
than most people had
anticipated.
When
drives started hitting the
120-GB mark, the T13
committee adopted an
industry
proposal pushed by Maxtor (a
major hard drive maker) called
Big
Drive
that
increased the limit to more
than 144 petabytes
(approximately
144,000,000
GB). T13 also thankfully
gave the new standard a
less-silly
name,
calling it ATA/ATAPI-6
or simply ATA-6 . Big
Drive was basically
just
a 48-bit
LBA, supplanting the older
24-bit addressing of LBA and INT13
ex-
tensions.
Plus, the standard defined
an enhanced block mode,
enabling
drives
to transfer up to 65,536 sectors in
one chunk, up from the
measly 256
sectors
of lesser drive technologies.
ATA-6
also introduced Ultra DMA
mode 5, kicking the data
transfer rate
up to
100 MBps. Ultra DMA mode 5
is more commonly referred to as
ATA/
100,
which requires the same
80-wire connectors as ATA/66.
ATA-7
ATA-7
brought two new innovations to the ATA
world⎯one
evolutionary
and the
other revolutionary. The
evolutionary innovation came with
the last
of the
parallel ATA Ultra DMA modes;
the revolutionary was a new form
of
ATA
called serial ATA
(SATA).
117
Chapter
8: Hard
Drive Technologies
ATA/133
ATA-7
introduced the fastest and
probably least adopted of
all the ATA
speeds,
Ultra DMA mode 6 ( ATA/133
). Even
though it runs at a speed
of
133
MBps, the fact that it
came out with SATA kept many
hard drive manu-
facturers
away. ATA/133 uses the same
cables as Ultra DMA 66 and
100.
While
you won't find many ATA/133 hard drives, you will find
plenty
of ATA/133
controllers. There's a trend in
the industry to color the
control-
ler
connections on the hard drive red,
although this is not part of
the ATA-7
standard.
Serial
ATA
The
real story of ATA-7 is SATA.
For all its longevity as
the mass storage
in-
terface
of choice for the PC,
parallel ATA has problems.
First, the flat
ribbon
cables
impede airflow and can be a
pain to insert properly.
Second, the ca-
bles
have a limited length, only
18 inches. Third, you can't
hot-swap PATA
drives.
You have to shut down completely
before installing or replacing
a
drive.
Finally, the technology has
simply reached the limits of
what it can do
in terms
of throughput.
Serial
ATA addresses these issues. SATA
creates a point-to-point
connec-
tion
between the SATA
device--hard disk, CD-ROM,
CD-RW, DVD-ROM,
DVD-RW,
and so on--and the SATA
controller. At a glance, SATA
devices
look
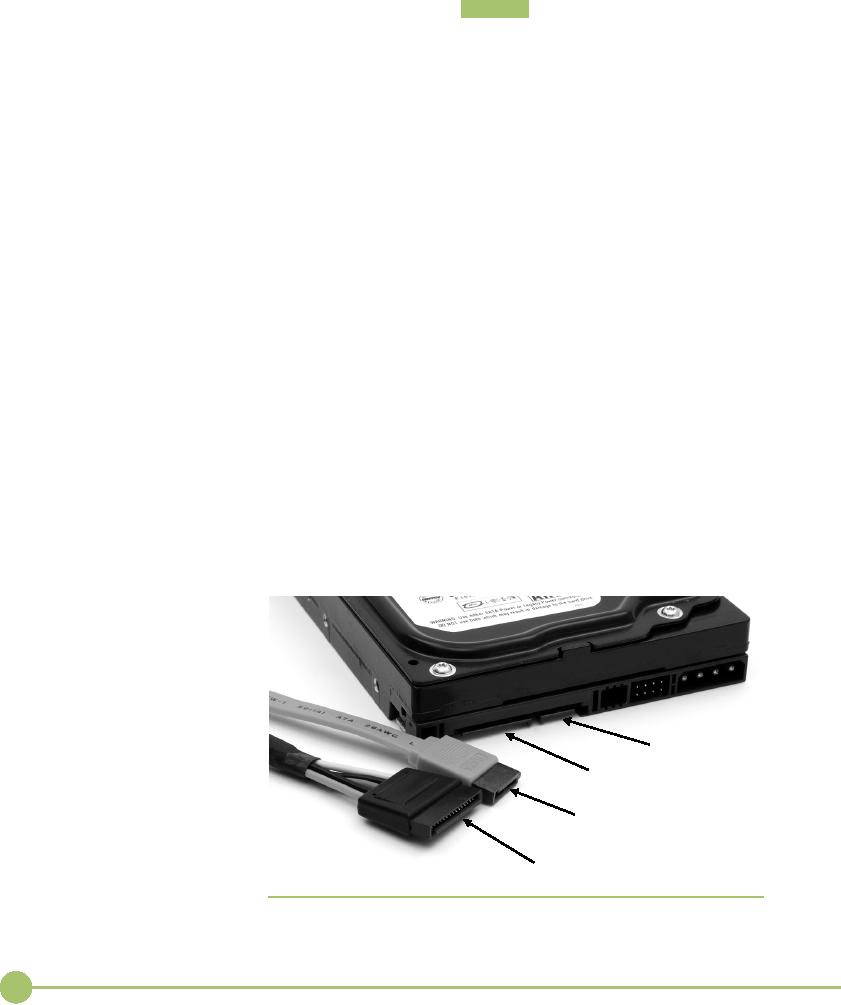
identical to standard PATA devices.
Take a closer look at the
cable and
power
connectors, however, and
you'll see significant
differences (Figure
8.25).
Because
SATA devices send data
serially instead of in parallel,
the
SATA
interface needs far fewer
physical wires--seven instead of
the eighty
wires
that is typical of PATA--resulting in
much thinner cabling.
This
might
not seem significant, but
the benefit is that thinner
cabling means
better
cable control and better
airflow through the PC case,
resulting in
better
cooling.
Data
port
Power
port
Data
cable
Power
cable
�
Figure
8.25
SATA
hard drive cables and
connectors
118
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)

Further,
the maximum SATA device
cable length is more than
twice that
Tech
Tip
of an IDE
cable--about 40 inches (1 meter)
instead of 18 inches. Again,
this
might
not seem like a big
deal, unless you've
struggled to connect a PATA
SATA
Names
hard
disk installed into the
top bay of a full-tower case to an IDE
connector
Number-savvy
readers might
located
all the way at the bottom of
the motherboard!
have
noticed a discrepancy
be-
SATA
does away with the entire
master/slave concept. Each
drive con-
tween
the names and
throughput
of the
two SATA drives. After
all,
nects to
one port, so no more
daisy-chaining drives. Further,
there's no maxi-
mum
number of drives⎯many
motherboards are now available
that support
1.5 Gb
per second
throughput
translates to
192 MB per
second,
up to
eight SATA drives. Want
more? Snap in a SATA host
card and load
a lot
higher than the
advertised
'em
up!
speed
of a "mere" 150 MBps.
The
The
big news, however, is in
data throughput. As the name
implies,
same is
true of the 3Gb/300
MBps
SATA
devices transfer data in
serial bursts instead of
parallel, as PATA de-
drives.
The encoding scheme
used
vices
do. Typically, you might not
think of serial devices as
being faster than
on SATA
drives takes about
parallel,
but in this case, that's
exactly the case. A SATA
device's single
20
percent of the overhead for
the
stream
of data moves much faster
than the multiple streams of
data coming
drive,
leaving 80 percent for pure
from a
parallel IDE device--theoretically up to 30
times faster! SATA
drives
bandwidth.
The 3Gb drive
created
come in
two common varieties, the
1.5Gb and the 3Gb, that
have a maxi-
all
kinds of problems, because
the
mum
throughput of 150 MBps and
300 MBps,
respectively.
name of
the committee
working
on the
specifications was called
SATA is
backward compatible with current PATA
standards and en-
the
SATA II committee, and
mar-
ables
you to install a parallel ATA device,
including a hard drive,
optical
keters
picked up on the SATA
II
drive,
and other devices, to a serial ATA
controller by using a SATA
bridge .
name.
As a result, you'll
find
A SATA
bridge manifests as a tiny
card that you plug directly
into the
many
brands called SATA
II
40-pin
connector on a PATA drive. As you can
see in Figure 8.26, the
con-
rather
than 3Gb. The SATA
com-
troller
chip on the bridge requires
separate power; you plug a Molex
con-
mittee
now goes by the
name
nector
into the PATA drive as normal.
When you boot the system,
the PATA
SATA-IO.
drive
shows up to the system as a SATA
drive.
SATA's
ease of use has made it the
choice for desktop system
storage,
and its
success is already showing in the
fact that more than 90
percent of all
hard
drives sold today are SATA
drives.
�
Figure
8.26
SATA
bridge
119
Chapter
8: Hard
Drive Technologies
eSATA
External
SATA (eSATA) extends
the SATA
bus to external
devices,
as the
name would imply. The
eSATA
drives use similar
connec-
tors to
internal SATA, but
they're
keyed
differently so you can't
mis-
take
one for the other. Figure
8.27
shows
eSATA connectors on
the
back of
a motherboard. eSATA
uses
shielded
cable lengths up to 2
me-
ters
outside the PC and is
hot
pluggable.
The beauty of eSATA
is
that it
extends the SATA bus at
full
speed,
so you're not limited to
the
meager
50 or 60 MBps of FireWire
or
USB.
�
Figure
8.27
eSATA
connectors (center; that's a FireWire
port on the left)
SCSI:
Still Around
■
Many
specialized server machines and
enthusiasts' systems use the
small
computer
system interface (SCSI) technologies
for various pieces of
core
hardware
and peripherals, from hard drives to
printers to high-end
tape
The CompTIA A+
220-604
backup
machines. SCSI is different from ATA in
that SCSI devices
connect
exam
tests you on SCSI and
together
in a string of devices called a
chain.
Each
device in the chain gets
a
RAID,
topics essential to
server
SCSI ID
to distinguish it from other devices on
the chain. Last, the
ends of a
environments.
SCSI
chain must be terminated.
Let's dive into SCSI now,
and see how SCSI
chains,
SCSI IDs, and termination
all work.
SCSI is
an old technology dating from the
late 1970s, but it has been
con-
tinually
updated. SCSI is faster than
ATA
(though
the gap is closing fast),
and until
SATA
arrived SCSI was the
only good
choice
for anyone using RAID (see
the
"RAID"
section a little later).
SCSI is ar-
guably
fading away, but it still
deserves
some
mention.
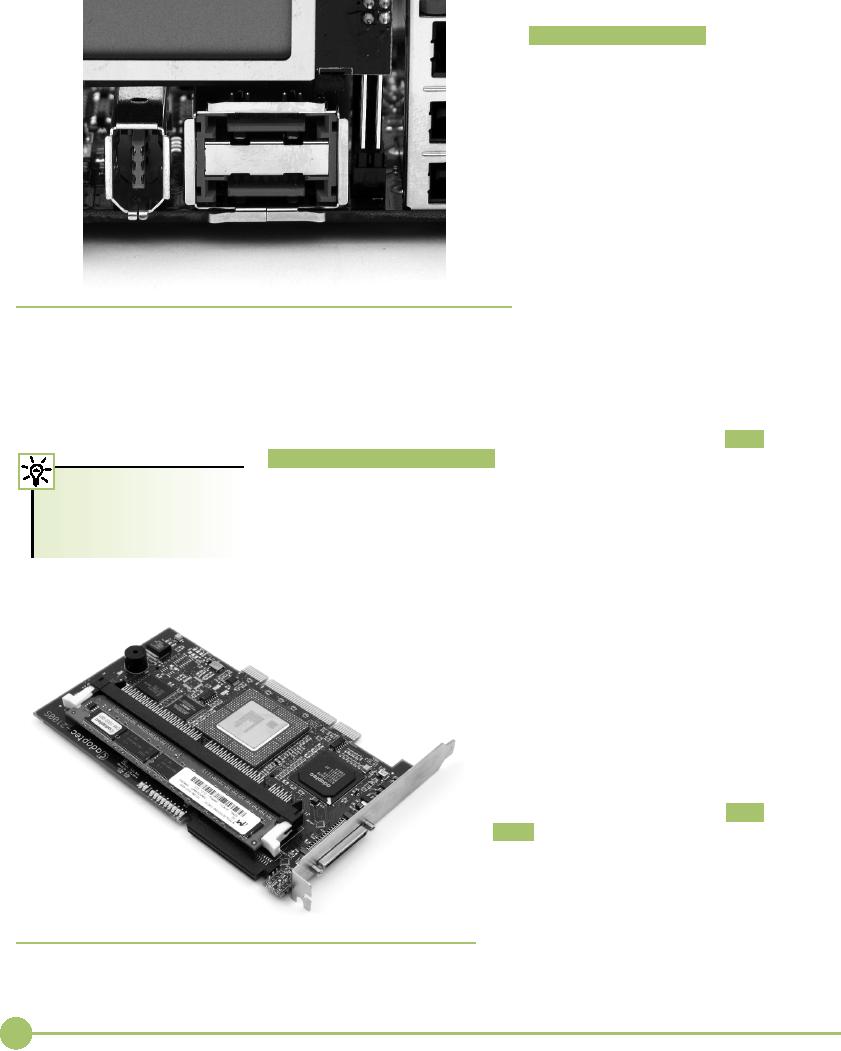
SCSI
Chains
SCSI
manifests itself through a
SCSI
chain
, a
series of SCSI devices
working
together
through a host adapter. The
host
adapter
provides the interface
between
the
SCSI chain and the PC.
Figure 8.28
shows a
typical PCI host adapter.
Many
techs
refer to the host adapter as
the SCSI
controller,
so
you should be comfortable
�
Figure
8.28
with
both terms.
SCSI
host adapter
120
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)

All SCSI
devices can be divided
into two
groups: internal and
external.
Internal
SCSI devices are attached
in-
side
the PC and connect to the
host
adapter
through the latter's
internal
connector.
Figure 8.29 shows an
inter-
nal
SCSI device, in this case a
CD-ROM
drive.
External devices hook to the
ex-
ternal
connector of the host
adapter.
Figure
8.30 is an example of an
external
SCSI
device.
Internal
SCSI devices connect
to
the
host adapter with a 68-pin
ribbon
cable
(Figure 8.31). This flat,
flexible ca-
ble
functions precisely like a
PATA
cable.
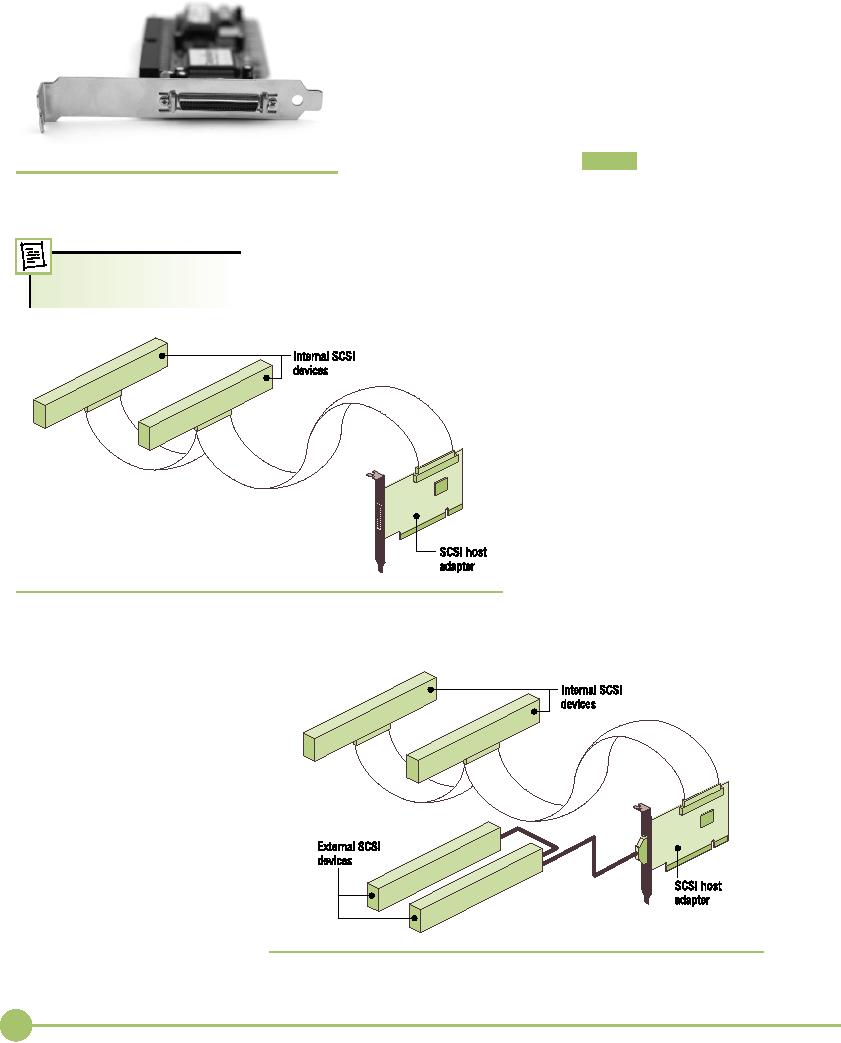
Many external devices connect
to
the
host adapter with a 50-pin
high
density
(HD) connector. Figure
8.32
shows a
host adapter external
port.
Higher
end SCSI devices use a
68-pin
high
density (HD) connector.
�
Figure
8.29 Internal
SCSI CD-ROM
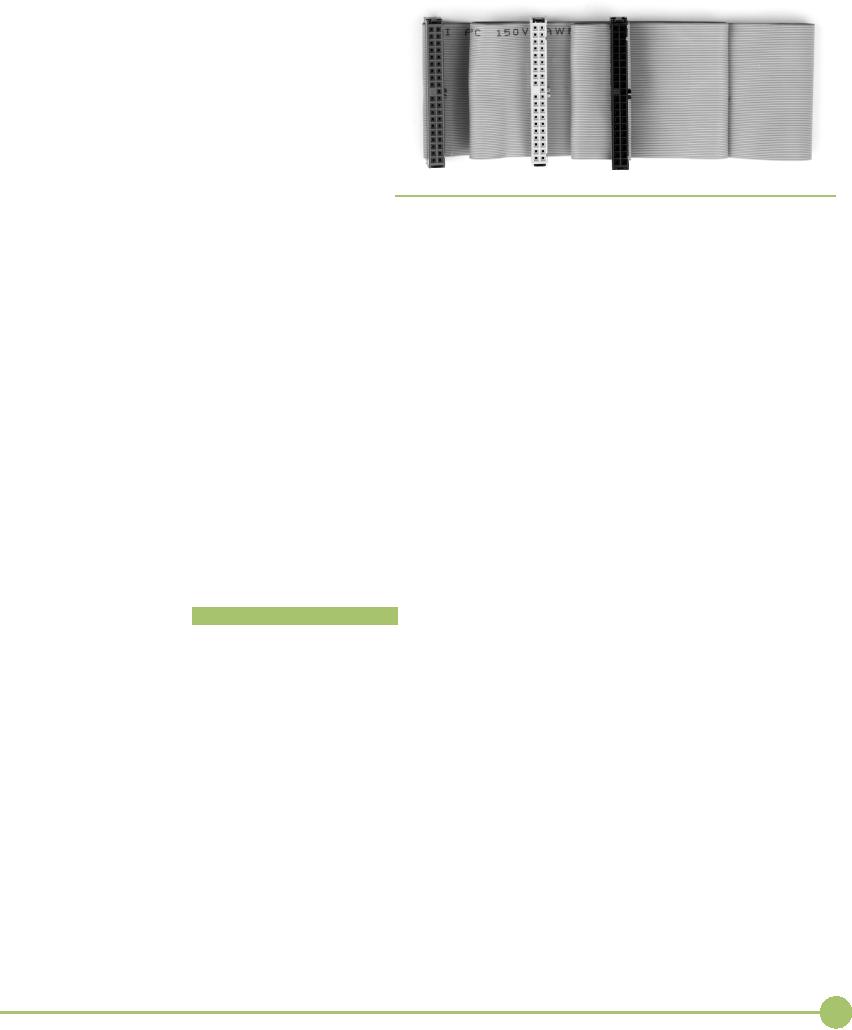
Multiple
internal devices can
be
connected
together simply by using
a
cable
with enough connectors. Figure
8.33, for example, shows a
cable that
can
take up to four SCSI devices,
including the host
adapter.
Assuming
the SCSI host adapter
has a standard external port
(some con-
trollers
don't have external
connections at all), plugging in an
external SCSI
device
is as simple as running a cable from
device to controller. The
external
SCSI
connectors are D-shaped, so you
can't plug them in backward. As
an
added
bonus, some external SCSI
devices have two ports, one
to connect to
the
host adapter and a second to
connect to another SCSI
device. The process
of
connecting a device directly to
another device is called daisy-chaining.
�
Figure
8.30
�
Figure
8.31
Back
of external SCSI
device
Typical
68-pin ribbon cable
121
Chapter
8: Hard
Drive Technologies
You can
daisy-chain up to 15 devices to one
host adapter. SCSI
chains
can be internal, external, or
both (see Figure
8.34).
SCSI
IDs
If
you're going to connect a
number of devices on the
same
SCSI
chain, you must provide some
way for the host adapter
to
tell
one device from another. To
differentiate devices,
SCSI
uses a
unique identifier called the
SCSI ID
. The
SCSI ID num-
ber
can range from 0 to 15. SCSI
IDs are similar to many
other
�
Figure
8.32 50-pin
HD port on SCSI host
adapter
PC
hardware settings in that a
SCSI device can
theoretically
have
any SCSI ID, as long as that
ID is not already taken by
an-
other
device connected to the same
host adapter.
Some
conventions should be followed when
setting SCSI IDs.
Typically,
Old
SCSI equipment
allowed
most
people set the host
adapter to 7 or 15, but you can
change this setting.
SCSI
IDs from 0 to 7 only.
Note
that there is no order for
the use of SCSI IDs. It
does not matter
which
device
gets which number, and
you
can
skip numbers. Restrictions
on
IDs
apply only within a single
chain.
Two
devices can have the
same ID, in
other
words, as long as they are
on
different
chains (Figure 8.35).
Every
SCSI device has
some
method
of setting its SCSI ID.
The
trick is
to figure out how as
you're
holding
the device in your hand.
A
SCSI
device may use jumpers,
dip
switches,
or even tiny dials;
every
new SCSI
device is a new adventure
as you
try to determine how to set
its
SCSI
ID.
�
Figure
8.33
Internal
SCSI chain with two
devices
�
Figure
8.34
Internal
and external devices on one
SCSI chain
122
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
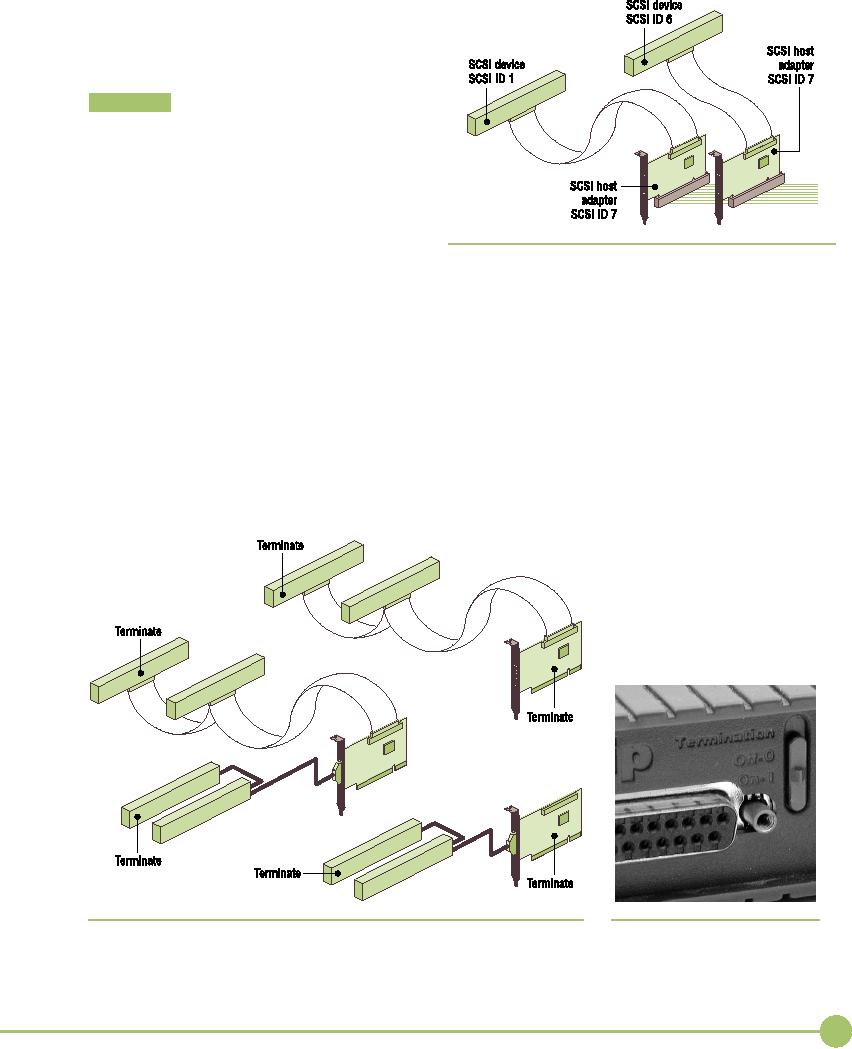
Termination
Whenever
you send a signal down a wire,
some of
that
signal reflects back up the
wire, creating an
echo and
causing electronic chaos.
SCSI chains use
termination
to
prevent this problem.
Termination
simply
means putting something on
the ends of the
wire to
prevent this echo.
Terminators are
usually
pull-down
resistors and can manifest
themselves in
many
different ways. Most of the
devices within a
PC have
the appropriate termination
built in. On
other
devices, including SCSI
chains and some net-
work
cables, you have to set
termination during
installation.
The
rule with SCSI is that you
must
terminate
�
Figure
8.35 IDs
don't conflict between separate
SCSI chains.
only
the
ends of the SCSI chain. You
have to termi-
nate
the ends of the cable,
which usually means
that
you need
to terminate the two devices at
the ends of the cable. Do
not
termi-
nate
devices that are not on
the ends of the cable.
Figure 8.36 shows some
ex-
amples
of where to terminate SCSI
devices.
Because
any SCSI device might be on
the end of a chain, most
manufac-
turers
build SCSI devices that
can self-terminate. Some
devices will detect
that
they are on the end of
the SCSI chain and will
automatically terminate
themselves.
Most devices, however,
require that you set a jumper or
switch to
enable
termination (Figure
8.37).
�
Figure
8.36
�
Figure
8.37
Location
of the terminated devices
Setting
termination
123
Chapter
8: Hard
Drive Technologies
Protecting
Data with RAID
■
Ask
experienced techs, "What is
the most expensive part of a
PC?" and
they'll
all answer in the same
way: "It's the data." You
can replace any
sin-
gle
part of your PC for a few hundred dollars
at most, but if you lose
critical
data--well,
let's just say I know of two
small companies that went
out of
business
just because they lost a
hard drive full of data.
Data is
king; data is your PC's raison
d'�tre. Losing
data is a bad thing,
so
you need
some method to prevent data
loss. Now, of course, you can
do
backups,
but if a hard drive dies, you have to
shut down the computer,
rein-
stall a
new hard drive, reinstall the
operating system, and then
restore the
backup.
There's nothing wrong with this as
long as you can afford the
time
and cost
of shutting down the
system.
A better
solution, though, would save your
data if a hard drive died and
enable
you to continue working throughout
the process. This is
possible if
you stop
relying on a single hard drive and
instead use two or more
drives
to store
your data. Sounds good, but how do you do
this? Well, first of
all,
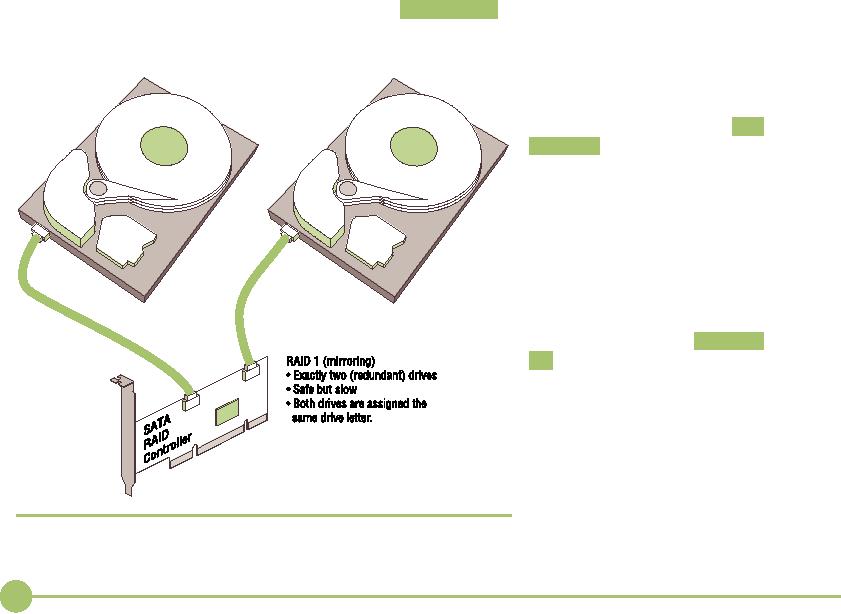
you
could install some fancy
hard drive controller that reads and
writes
data to
two hard drives simultaneously (Figure
8.38). The data on each
drive
would
always be identical. One drive would be
the primary drive and
the
other
drive, called the mirror
drive,
would not be used unless the
primary
drive
failed. This process of
reading and writing data at
the same time to
two
drives is called disk
mirroring .
If you
really want to make data
safe, you can use two
separate control-
lers for
each drive. With two drives,
each on a separate controller,
the
system
will continue to operate,
even if
the primary drive's
control-
ler
stops working. This
super-drive
mirroring
technique is called disk
duplexing
(Figure
8.39). Disk du-
plexing
is also much faster
than
disk
mirroring because one
control-
ler
does not write each
piece of data
twice.
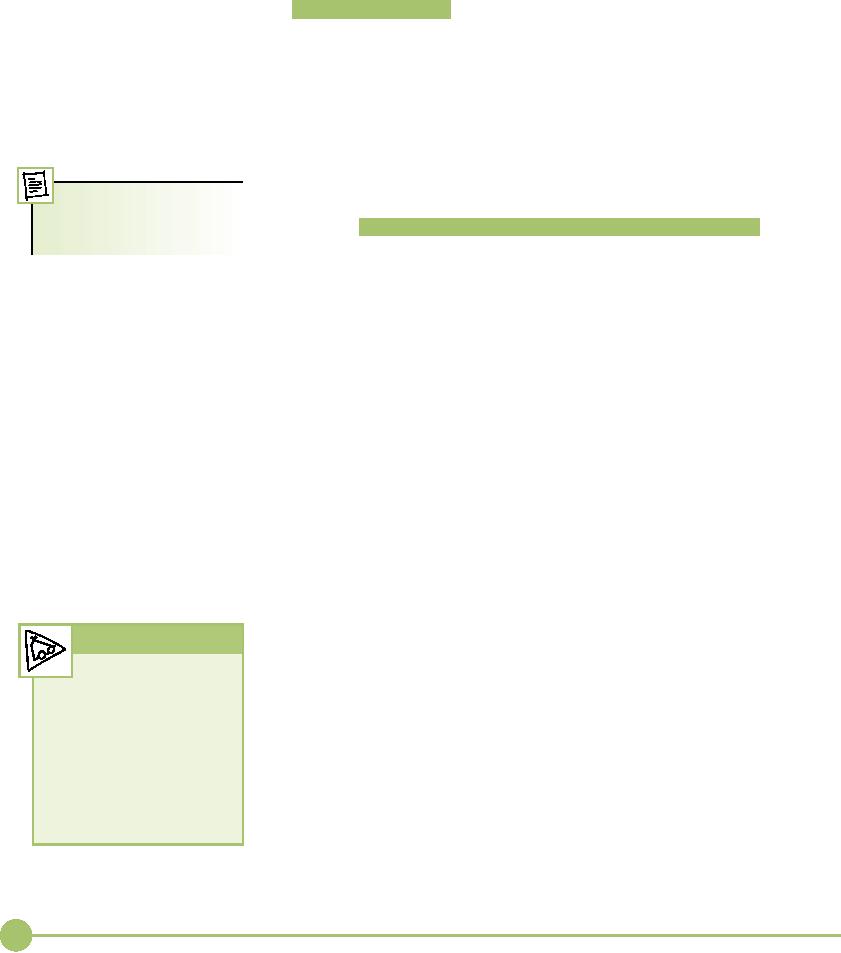
Even
though duplexing is
faster
than
mirroring, they both
are
slower
than the classic one
drive,
one
controller setup. You can
use
multiple
drives to increase your
hard drive
access speed. Disk
strip-
ing
(without
parity) means spread-
ing the
data among multiple
(at
least
two) drives. Disk striping
by
itself
provides no redundancy. If
you save
a small Microsoft Word
file,
for example, the file is
split into
multiple
pieces; half of the pieces
go
on one
drive and half on the
other
(Figure
8.40).
�
Figure
8.38
Mirrored
drives
124
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
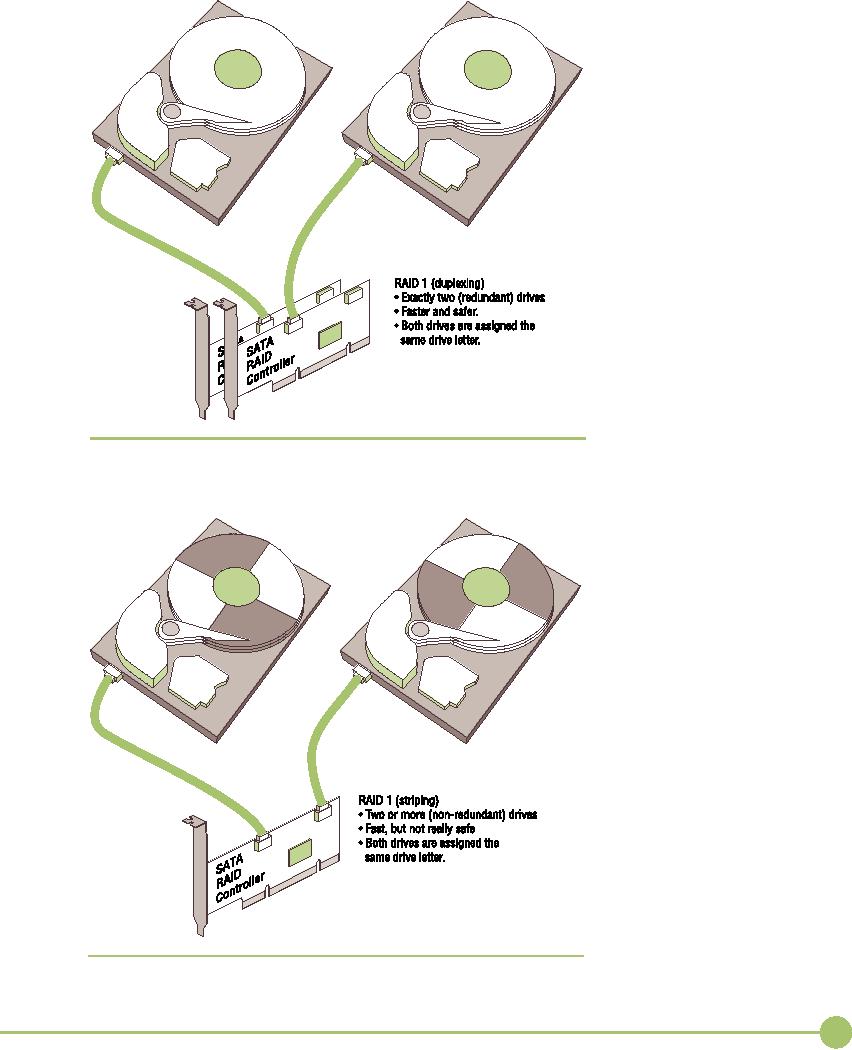
�
Figure
8.39
Duplexing
drives
�
Figure
8.40
Disk
striping
125
Chapter
8: Hard
Drive Technologies
The
one and only advantage of
disk striping is speed--it is a
fast way to
read and
write to hard drives. But if
either drive fails, all
data is
lost. Disk
striping
is not something you should
do--unless you're willing to
increase
the
risk of losing data to
increase the speed at which
your hard drives save
and
restore data.
Disk
striping with parity , in
contrast, protects data by
adding extra infor-
mation,
called parity
data, that
can be used to rebuild data
should one of the
drives
fail. Disk striping with
parity requires at least
three drives, but it is
common
to use more than three.
Disk striping with parity
combines the best
of disk
mirroring and plain disk
striping. It protects data and is
quite fast.
The
majority of network servers
use a type of disk striping
with parity.
RAID
A couple
of sharp guys in Berkeley
back in the 1980s organized
the many
An array in the context
of
techniques
for using multiple drives for
data protection and
increasing
RAID
refers to a collection of
two
speeds
as the redundant
array of independent (or inexpensive)
disks (RAID) .
or more
hard drives.
They
outlined seven levels of
RAID, numbered 0 through
6.
RAID 0--Disk
Striping Disk
striping requires at least two
drives.
■
It does
not provide redundancy to
data. If any one drive
fails, all
data is
lost.
RAID 1--Disk
Mirroring/Duplexing RAID 1
arrays require at
■
least
two hard drives, although they
also work with any
even
number
of drives. RAID 1 is the ultimate in
safety, but you lose
storage
space since the data is
duplicated--you need two
100-GB
drives
to store 100 GB of
data.
RAID 2--Disk
Striping with Multiple
Parity Drives RAID 2
was
■
a weird RAID
idea that never saw
practical use. Unused,
ignore it.
RAID 3
and 4--Disk Striping with
Dedicated Parity RAID 3
and
■
4
combined dedicated data
drives with dedicated parity
drives. The
differences
between the two are trivial.
Unlike RAID 2, these
versions
did see some use in the
real world but were
quickly
replaced
by RAID 5.
RAID 5--Disk
Striping with Distributed
Parity Instead
of
■
dedicated
data and parity drives, RAID 5
distributes data and
parity
information
evenly across all drives.
This is the fastest way
to
Tech
Tip
provide
data redundancy. RAID 5 is by far the
most common RAID
implementation
and requires at least three
drives. RAID 5 arrays
RAID
Lingo
effectively
use one drive's worth of
space for parity. If, for
example,
No tech
worth her salt
says
you have
three 200-GB drives, your
total storage capacity is
400 GB.
things
like, "We're implementing
If you
have four 200-GB drives, your
total capacity is 600
GB.
disk
striping with parity."
Use
the
RAID level. Say, "We're
im-
RAID 6--Disk
Striping with Extra Parity
If you
lose a hard drive
■
plementing
RAID 5." It's
more
in a RAID 5
array, your data is at great
risk until you replace the
bad
accurate
and very impressive
to
hard drive and
rebuild the array. RAID 6 is RAID 5 with
extra parity
the
folks in the accounting
information.
RAID 6 needs at least five drives, but in
exchange you
department!
can
lose up to two drives at the
same time. RAID 6 is gaining
in
popularity
for those willing to use
larger arrays.
126
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
After
these first RAID levels were
defined, some manufacturers
came up
with
ways to combine different
RAIDs. For example, what if you
took two
You'll
hear the term nested
pairs of
striped drives and mirrored
the pairs? You would get what is
called
RAID
used
for multiple RAID
solutions.
The terms are
RAID
0+1. Or what (read this
carefully now) if you took two pairs of
mir-
synonymous.
rored
drives and striped the
pairs? You then get what we
call RAID 1+0 or
what is
often called RAID 10.
Combinations of different types of
single
RAID are
called multiple
RAID solutions.
Multiple RAID solutions,
while
enjoying
some support in the real
world, are quite rare when
compared to
There
is actually a term for a
single
RAID solutions RAID 0, 1, and 5.
storage
system composed of
multiple
independent disks,
rather
than disks organized
us-
Implementing
RAID
ing
RAID: JBOD, which stands
for
Just a Bunch of Disks
(or
RAID
levels describe different
methods of providing data
redundancy or
Drives).
enhancing
the speed of data throughput
to and from groups of hard drives.
They do
not say how
to
implement these methods.
Literally thousands of dif-
ferent
methods can be used to set
up RAID. The method used
depends
largely
on the desired level of
RAID, the operating system
used, and the
thickness
of your wallet.
The
obvious starting place for RAID is to
connect at least two hard
drives
in some fashion to create a RAID
array. For many years, if
you
wanted
to do RAID beyond RAID 0 and RAID 1, the
only technology you
could
use was good-old SCSI.
SCSI's chaining of multiple
devices to a single
controller
made it a natural for RAID.
SCSI drives make superb RAID
ar-
rays,
but the high cost of SCSI
drives and RAID-capable host
adapters kept
RAID
away from all but the most
critical systems--usually big
file servers.
In the
last few years, substantial
leaps in ATA technology have
made
ATA a
viable alternative to SCSI drive
technology for RAID arrays.
Special-
ized ATA
RAID controller cards support ATA RAID
arrays of up to 15
drives--plenty
to support even the most
complex RAID needs. In
addition,
the
inherent hot-swap capabilities of
serial ATA have virtually
guaranteed
that
serial ATA will quickly take over
the lower end of the RAID
business.
Try
This!
Managing
Heat with Multiple
Drives
Adding
three or more fast hard
drives into a cramped PC case
can be a
recipe
for disaster to the unwary tech. All
those disks spinning
con-
stantly
create a phenomenal amount of
heat. Heat kills PCs!
You've got
to
manage the heat inside a
RAID-enabled system or risk
losing your
data,
drives, and basic system
stability. The easiest way to do
this is to
add
fans, so Try This!
Open up
your PC case and look for built-in places
to mount fans.
How many
case fans do you have installed
now? What size are
they?
What
sizes can you use? (Most
cases use 80 mm fans, but 60 and
120 mm
fans
are common as well.) Jot
down the particulars of your system
and
take a
trip to the local PC store
to check out the
fans.
Before
you get all fan-happy and
grab the biggest and baddest
fans
to throw in your
case, don't forget to think
about the added noise
level.
Try to
get a compromise between
keeping your case cool enough
and
not
causing early
deafness!
127
Chapter
8: Hard
Drive Technologies
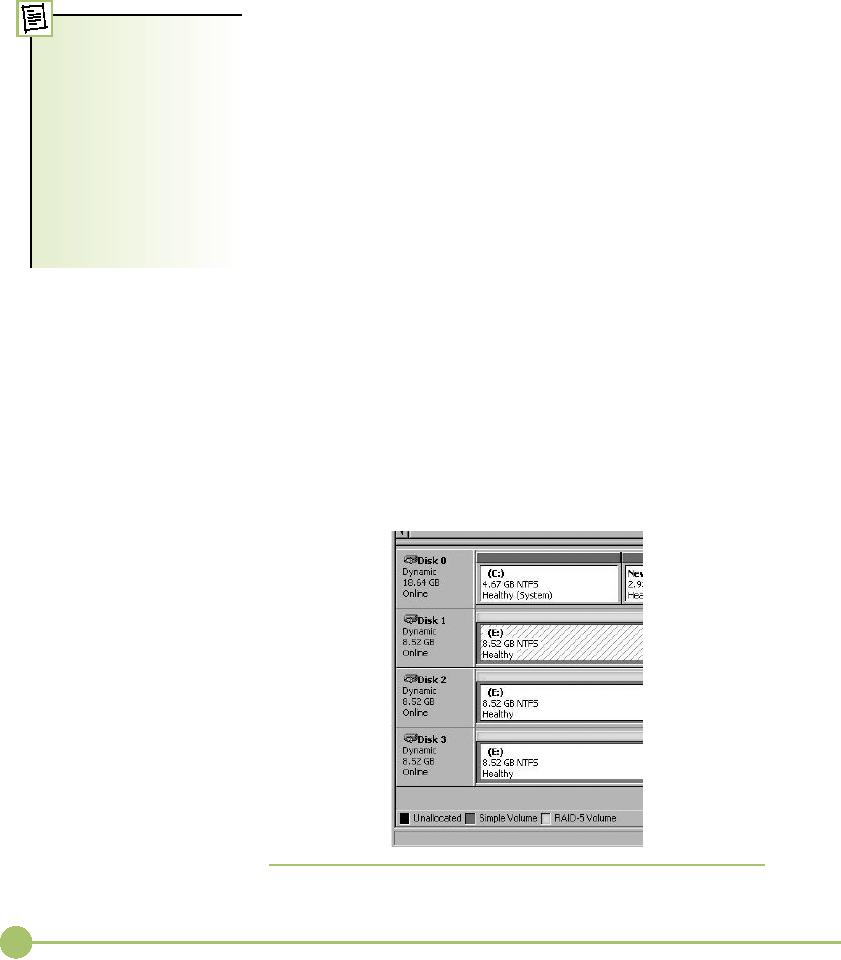
Personally,
I think the price and
performance of serial ATA mean
SCSI's
days
are numbered.
Once you
have a number of hard drives,
the next question is whether
to
use
hardware or software to control
the array. Let's look at
both options.
Hardware
versus Software
You
can use Disk
Manage-
ment in
Windows 2000 and Win-
All RAID
implementations break down into
either hardware or software
meth-
dows XP
Professional to create
ods.
Software is often used when
price takes priority over
performance. Hard-
RAID 1 and RAID 5
arrays, but
ware is
used when you need
speed along with data
redundancy. Software
you can
use Disk Management
only
remotely on a server
ver-
RAID
does not require special
controllers--you can use the
regular ATA con-
sion of
Windows (2000 Server
or
trollers
or SCSI host adapters to
make a software RAID array.
But you do need
Server
2003). In other words,
the
"smart"
software. The most common
software implementation of RAID is
the
capability
is there, but Microsoft
built-in
RAID software that comes with
Windows 2000 Server and
Windows
has
limited the OS. If you
want
Server
2003. The Disk Management
program in these Windows
Server ver-
to use
software RAID in Win-
dows
2000 or XP (Home or Pro-
sions
can configure drives for RAID 0, 1, or 5,
and it works with ATA or
SCSI
fessional),
you need to use a
(Figure
8.41). Disk Management in
Windows 2000 Professional
and Windows
third-party
tool to set it up.
XP
Professional, in contrast, can
only do RAID 0.
Windows
Disk Management is not the
only software RAID game
in
town. A
number of third-party software
programs can be used with
Win-
dows or
other operating
systems.
Software
RAID means the operating
system is in charge of all
RAID
functions.
It works for small RAID solutions but
tends to overwork your op-
erating
system easily, creating
slowdowns. When you really
need to
keep
going,
when you need RAID that doesn't
even let the users know a
problem
has
occurred, hardware RAID is the
answer.
Hardware
RAID centers around an intelligent
controller--either
a SCSI
host
adapter or an ATA controller that
handles all of the RAID
functions
(Figure
8.42). Unlike a regular ATA
controller or SCSI host
adapter, these
controllers
have chips that know how to
"talk RAID."
�
Figure
8.41
Disk
Management in Windows Server 2003
128
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
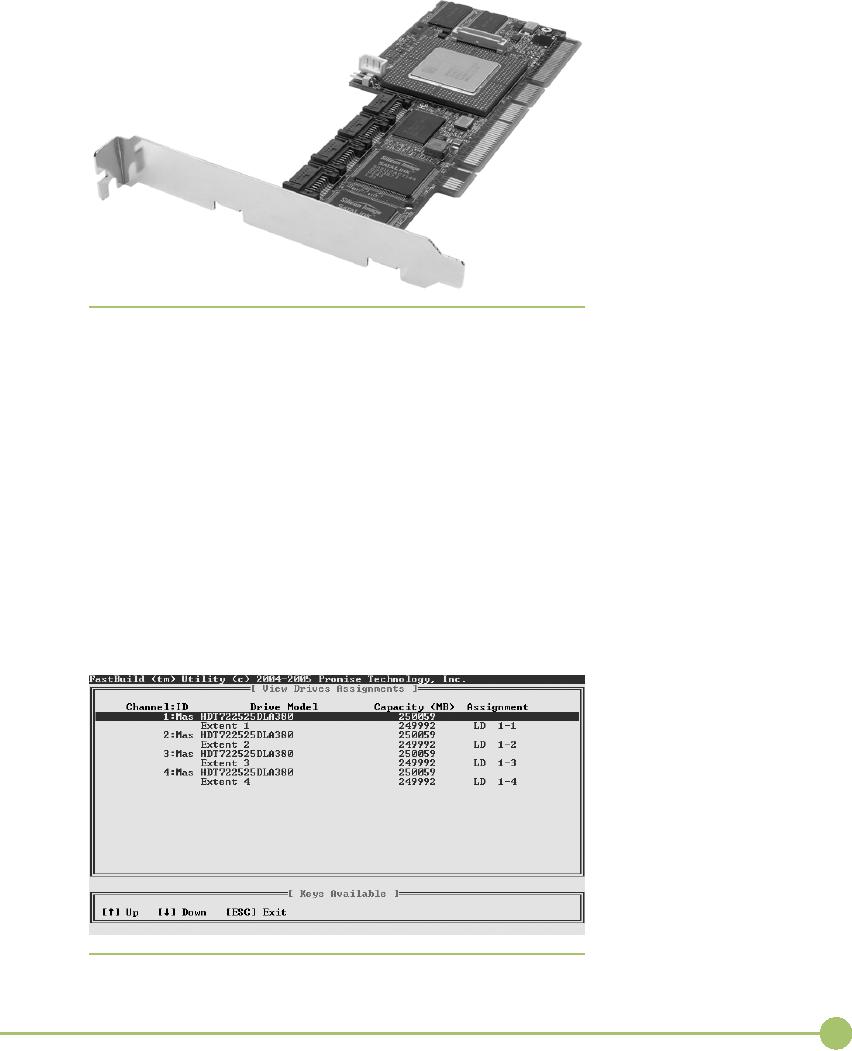
�
Figure
8.42
Serial
ATA RAID controller
Most
RAID setups in the real world
are hardware-based. Almost
all of
the
many hardware RAID solutions
provide hot-swapping--the
ability to re-
place a
bad drive without disturbing
the operating system.
Hot-swapping is
common
in hardware RAID.
Hardware-based
RAID is invisible to the operating
system and is config-
ured in
several ways, depending on
the specific chips involved.
Most RAID
systems
have a special configuration
utility in Flash ROM that you
access af-
ter
CMOS but before the OS
loads. Figure 8.43 shows a
typical firmware pro-
gram
used to configure a hardware RAID
solution.
Personal
RAID
Due to
drastic reductions in the
cost of ATA RAID controller chips,
in
the
last few years we've seen an
explosion of ATA-based hardware
RAID
�
Figure
8.43
RAID
configuration utility
129
Chapter
8: Hard
Drive Technologies
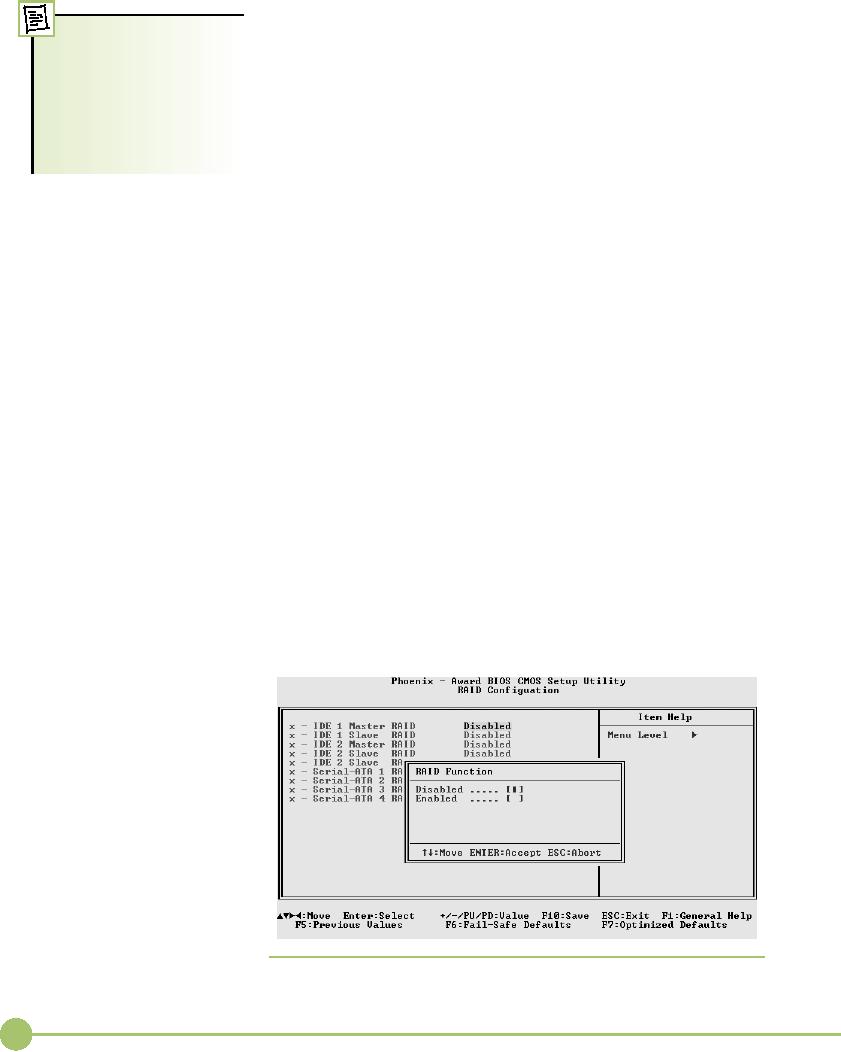
solutions
built into mainstream
motherboards. While this "ATA RAID
on
the
motherboard" began with parallel ATA,
the introduction of serial
ATA
RAID
controllers aren't
just
made
motherboards with built-in RAID extremely
common.
for
internal drives; some models
can
handle multiple eSATA
These
personal RAID motherboards might be
quite common, but
drives
configured using any
of
they're
not used too terribly
often given that these RAID
solutions usually
the
different RAID levels. If
provide
only RAID 0 or RAID 1. If you want to use
RAID, spend a few
extra
you're
feeling lucky, you can
cre-
dollars
and buy a RAID 5capable
controller.
ate a
RAID array using both
in-
ternal
and external SATA
drives.
The
Future Is RAID
RAID has
been with us for about 20 years, but
until only recently it was
the
domain
of big systems and deep
pockets. During those 20 years,
however, a
number
of factors have come
together to make RAID a reality for
both big
servers
and common desktop systems.
Imagine a world where
dirt-cheap
RAID on
every computer means no one
ever again losing critical
data. I get
goose
bumps just thinking about
it!
Connecting
Drives
■
Installing
a drive is a fairly simple process if you
take the time to make
sure
you've
got the right drive for your
system, configure the drive
properly,
and do a few
quick tests to see if it's
running properly. Since
PATA, SATA,
and SCSI
have different cabling
requirements, we'll look at each of
these
separately.
Choosing
Your Drive
First,
decide where you're going to
put the drive. Look for an
open ATA
connection.
Is it PATA or SATA? Is it a dedicated RAID
controller? Many
motherboards
with built-in RAID controllers have a
CMOS setting that
en-
ables
you to turn the RAID on or off (Figure
8.44). Do you have the right
con-
troller
for a SCSI drive?
�
Figure
8.44
Settings
for RAID in CMOS
130
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
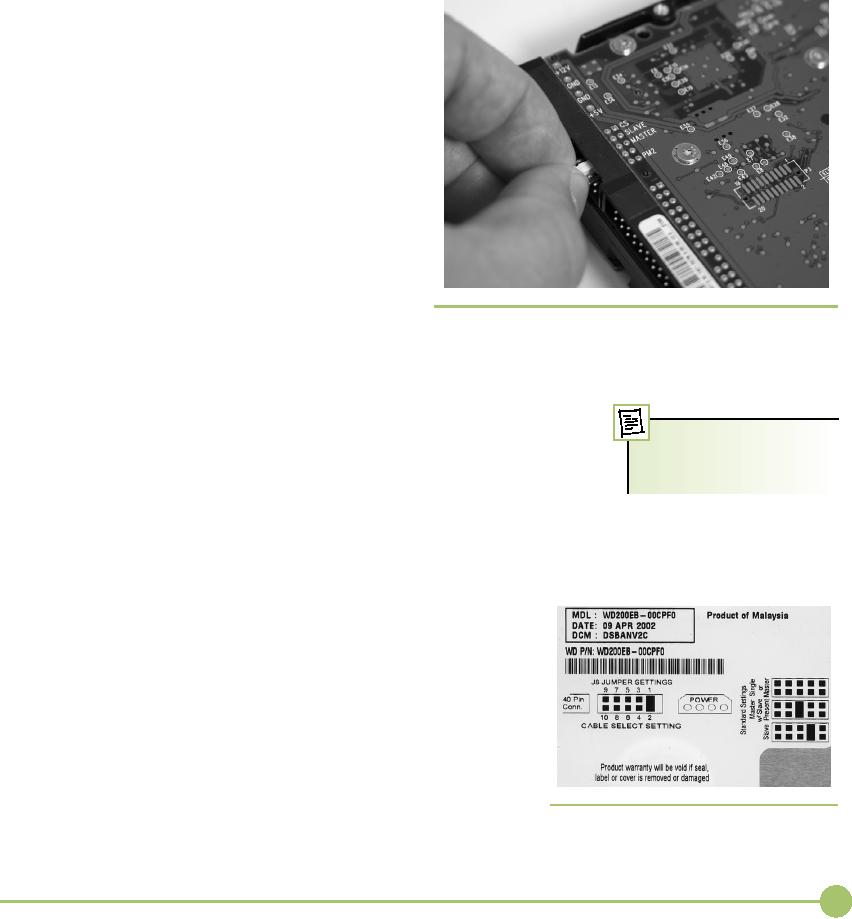
Second,
make sure you have room for
the drive in the case. Where
will
you
place it? Do you have a
spare power connector? Will
the data and power
cables
reach the drive? A quick
test fit is always a good
idea.
Don't worry
about PIO Modes and DMA⎯a new drive will
support
anything
your controller wants to
do.
Jumpers
and Cabling
on PATA
Drives
If you
have only one hard drive,
set the drive's
jumpers
to master or standalone. If you have
two
drives,
set one to master and the
other to slave. See
Figure
8.45 for a close-up of a PATA hard
drive
showing
the jumpers.
At first
glance, you might notice
that the jump-
ers
aren't actually labeled master
and
slave.
So
how
do you know how to
set them properly? The
easi-
est way
is to read the front of the
drive; most
drives
have a diagram on the
housing that explains
how to set
the jumpers properly. Figure
8.46 shows
the
front of one of these
drives, so you can see
how
to set
the drive to master or
slave.
Hard
drives may have other
jumpers that may
or may
not concern you during installation.
One �
Figure
8.45 Master/slave
jumpers on a hard drive
common
set of jumpers is used for
diagnostics at
the
manufacturing plant or for special
settings in
other
kinds of devices that use
hard drives. Ignore
them.
They have no bearing in the
PC world. Second, many
drives provide a
third
setting, which is used if
only one drive connects to a
controller. Often,
Most of
the high speed ATA/
66/100/133
cables support cable
master
and single drive are the
same setting on the hard
drive, although
select--try
one and see!
some
hard drives require separate
settings. Note that the
name for the single
drive
setting varies among
manufacturers. Some use
Single; others use 1
Drive or
Standalone.
Many
current PATA hard drives use a
jumper setting called cable
select,
rather
than master or slave. As the
name implies, the position
on the cable
determines
which drive will be master or slave:
master on the end, slave
in
the
middle. For cable select to
work properly with two drives,
both
drives
must be set as cable select
and the cable itself must be
a spe-
cial
cable-select cable. If you see a
ribbon cable with a
pinhole
through
one wire, watch out!
That's a cable-select
cable.
If you
don't see a label on the
drive that tells you how to set
the
jumpers,
you have several options.
First, look for the drive
maker's
Web
site. Every drive manufacturer
lists its drive jumper
settings on
the
Web, although it can take a
while to find the information
you
want.
Second, try phoning the hard
drive maker directly.
Unlike
many
other PC parts manufacturers, hard drive
producers tend to
stay in
business for a long period of
time and offer great
technical
support.
Hard drive
cables have a colored stripe
that corresponds to the �
Figure
8.46 Drive
label showing
master/slave
number-one
pin--called pin
1--on the
connector. You need to
make
settings
131
Chapter
8: Hard
Drive Technologies
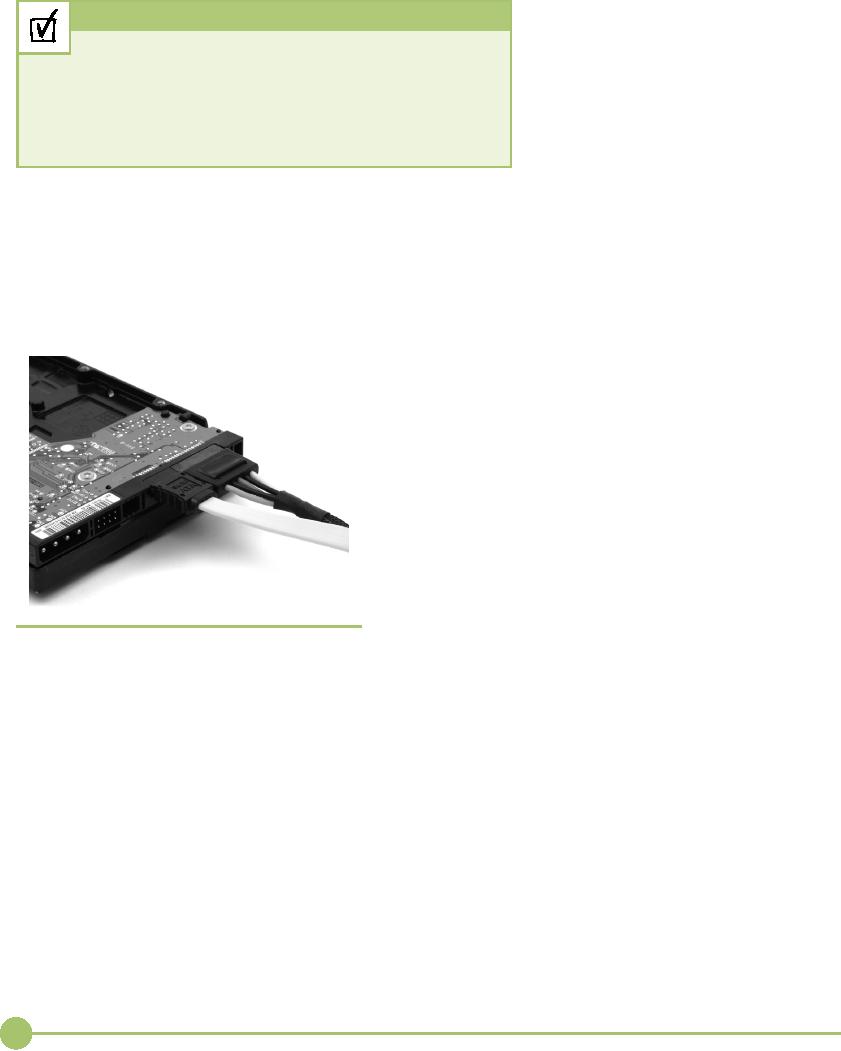
certain
that pin 1 on the
controller
Cross
Check
is on
the same wire as pin 1 on
the
hard
drive. Failing to plug in
the
Molex
Connectors
drive
properly will also
prevent
Hard
drives and other internal
devices use Molex connectors
for power.
the PC
from recognizing the
drive.
Check
your memory from the Essentials
course. What voltages
go
If you
incorrectly set the
master/
through
the four wires on a Molex
connector? What should you
note
slave
jumpers or cable to the
hard
about
the connector and inserting it
into the corresponding
socket on
drives,
you won't break anything;
the
drive?
it just
won't work.
Finally,
you need to plug a
Molex
connector from the power supply
into the drive. All modern
PATA
drives
use a Molex
connector.
Cabling
SATA Drives
Installing
SATA hard drives is even easier
than installing IDE devices due
to
the
fact that there's no master,
slave, or cable select
configuration to mess
with. In
fact, there are no jumper
settings to worry about at
all, as
SATA supports only a single
device per controller
channel.
Simply connect the power and plug in
the control-
ler
cable as shown in Figure
8.47--the OS automatically
de-
tects
the drive and it's ready to
go! The keying on
SATA
controller
and power cables makes it impossible to
install
either
incorrectly.
The
biggest problem with SATA drives is
that many
motherboards
come with four or more. Sure,
the cabling is
easy
enough, but what do you do when it comes
time to
start
the computer and the system
is trying to find the
right
hard drive to
boot up! That's where CMOS
comes into
play.
Connecting
SCSI Drives
�
Figure
8.47
Properly
connected SATA cable
Connecting
SCSI drives requires three
things. You must
use a
controller that works with your
drive. You need to
set
unique
SCSI IDs on the controller
and the drive.
Finally,
you need
to connect the ribbon cable
and power connections properly.
With
SCSI,
you need to attach the data
cable correctly. You can
reverse a PATA
cable,
for example, and nothing happens
except the drive doesn't
work. If
you
reverse a SCSI cable,
however, you can seriously
damage the drive.
Just
as with PATA
cables, pin 1 on the SCSI
data cable must go to pin 1 on
both
the
drive and the host
adapter.
BIOS
Support: Configuring CMOS
■
and
Installing Drivers
Every
device in your PC needs BIOS
support, and the hard drive
controllers
are no
exception. Motherboards provide
support for the ATA hard drive
132
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
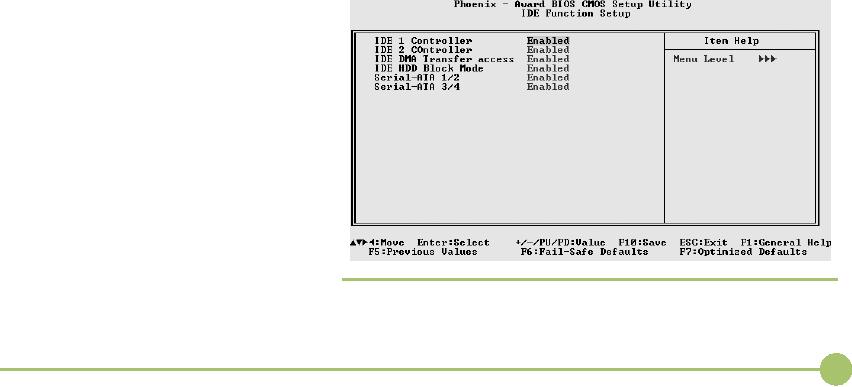
controllers
via the system BIOS, but
they require configuration in
CMOS for
the
specific hard drives attached.
SCSI drives require software
drivers or
firmware
on the host adapter.
In the
old days, you had to fire up CMOS and
manually enter CHS
infor-
mation
whenever you installed a new ATA drive to
ensure the system
saw
the
drive. Today, this process
still takes place, but it's
much more auto-
mated.
Still, there's plenty to do in
CMOS when you install a new hard
drive.
CMOS
settings for hard drives vary a lot
among motherboards. The
fol-
lowing
information provides a generic
look at the most common
settings,
but
you'll need to look at your
specific motherboard manual to
understand
all
the options
available.
Configuring
Controllers
As a
first step in configuring
controllers, make certain
they're enabled. It's
easy to
turn off controllers in CMOS, and many
motherboards turn off sec-
ondary
ATA controllers by default. Scan
through your CMOS settings to
lo-
cate
the controller on/off options
(see Figure 8.48 for typical
settings). This
is also
the time to check whether
your onboard RAID controllers work
in
both
RAID and non-RAID settings.
Autodetection
If the
controllers are enabled and
the drive is properly connected,
the drive
should
appear in CMOS through a
process called autodetection.
Autodetection
is a
powerful and handy feature,
but it seems every CMOS
has a different
way to
manifest it, and how it is
manifested may affect how
your computer
decides
which hard drive to try to
boot when you start your
PC.
One of
your hard drives stores the
operating system needed when
you
boot
your computer, and your system needs a
way to know where to look
for this
operating system. The
traditional BIOS supported a
maximum of
only
four ATA drives on two controllers,
called the primary
controller and
the
secondary
controller. The
BIOS
looked
for the master drive on
the
primary
controller when the
system
booted
up. If you used only
one
controller,
you used the primary
controller.
The secondary
controller
was
used for CD-ROMs, DVDs,
or
other
non-bootable drives.
Older
CMOS made this
clear
and
easy, as shown in Figure
8.49.
When you
booted up, the
CMOS
would
query the drives
through
autodetection,
and whatever drives
the
CMOS saw would show
up
here.
Some even older CMOS had
a
special
menu
option
called
Autodetect
that you had to run to �
Figure
8.48 Typical
controller settings in
CMOS
133
Chapter
8: Hard
Drive Technologies
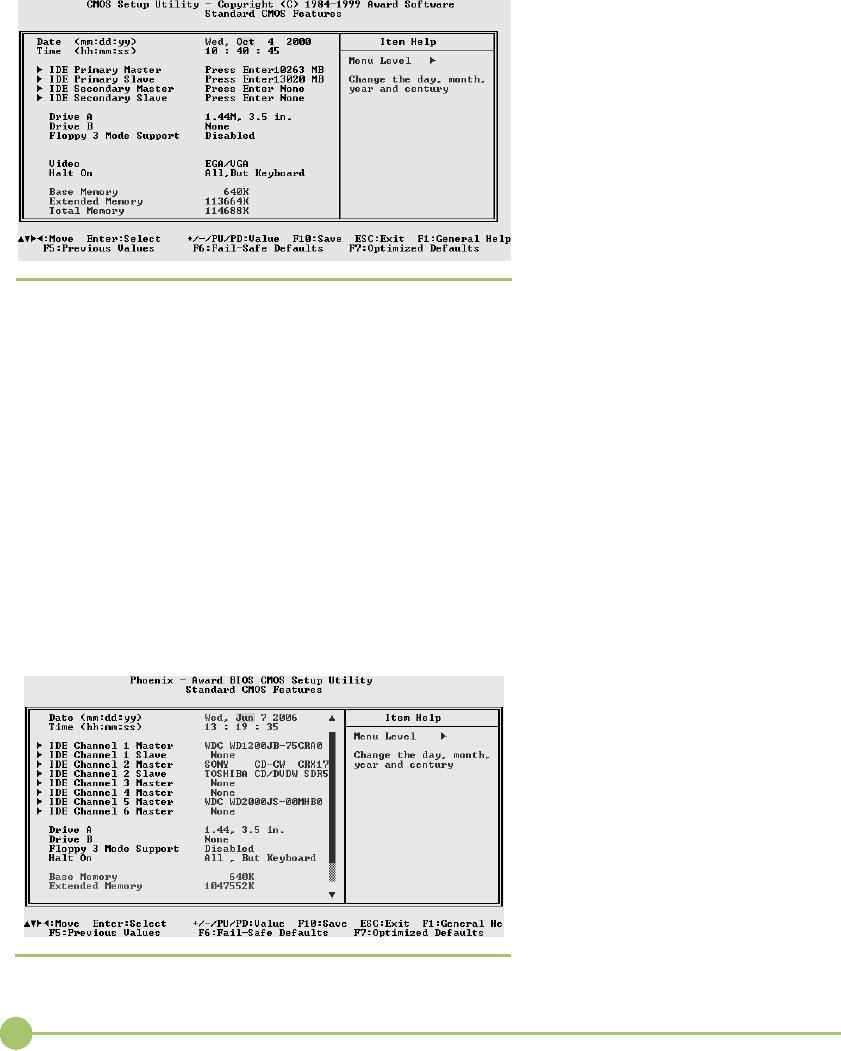
see
the drives in this screen.
There
are
places for up to four de-
vices⎯notice
not all of them
actu-
ally
have a device.
The
autodetection screen
indi-
cated
that you installed a
PATA
drive
correctly. If you installed
a
hard
drive on the primary
controller
as
master, but messed up the
jumper
and set
it to slave, it would show up
in the
autodetection screen as
the
slave.
If you had two drives and
set
them
both to master, one drive or
the
other
(or sometimes both) didn't
ap-
pear,
telling you that something
was
messed
up in the physical
installa-
�
Figure
8.49
Old
standard CMOS
settings
tion. If
you forgot to plug in the
rib-
bon
cable or the power, the
drives
wouldn't
autodetect.
SATA
messed up the autodetection
happiness. There's no such
thing as
master,
slave, or even primary and
secondary controller in the SATA
world.
To get
around this, motherboards with PATA and
SATA today use a num-
bering
system⎯and
every motherboard uses its
own numbering system!
One
common numbering method uses
the term channels
for
each controller.
The
first boot device is channel
1, the second is channel 2, and so
on. PATA
channels
may have a master and a
slave, but a SATA channel has
only a
master,
as SATA controllers support only
one drive. So instead of
names of
drives,
you see numbers. Take a look
at Figure 8.50.
Whew!
Lots of hard drives! This
motherboard supports the
traditional
four PATA
drives, but it also supports four SATA
drives. Each controller
is
assigned
a number⎯note
that channel 1 and channel 2
have master/slave
settings,
and that's how you know channel 1 and 2
are the PATA drives.
Channels
3 through 6 are SATA, even
though the listing says
master.
(SATA's
still somewhat new, and
a
CMOS
using incorrect terms
like
master
is
common.)
Boot
Order
If you want your
computer to run,
it's
going to need an operating
sys-
tem to
boot. While the PCs of
our
forefathers
(those of the 1980s
and
early
1990s) absolutely
required
you to put
the operating system
on
the
primary master, most
BIOS
makers
by 1995 enabled you to put
the OS
on any of the four drives
and
then
tell the system through
CMOS
which
hard drive to boot. Addition-
�
Figure
8.50
New
standard CMOS features
ally,
you may need to boot
from
134
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
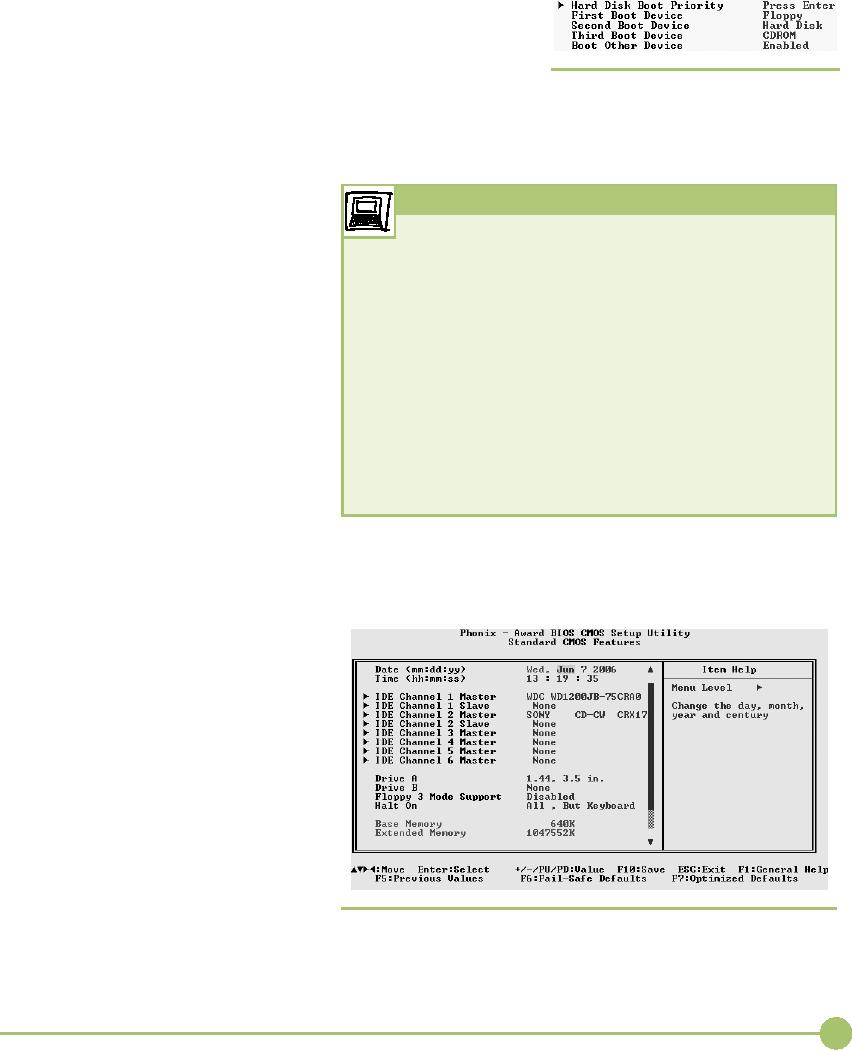
a
floppy, CD-ROM, or even a
thumb drive at times. CMOS
takes
care of
this by enabling you to set a
boot
order.
Figure
8.51 shows a typical boot
order screen. It has a
first, sec-
ond, and
third boot option. Many
users like to boot first
from floppy
or
CD-ROM, and then from a hard drive.
This enables them to put
in
�
Figure
8.51 Boot
order
a
bootable floppy or CD-ROM if they're
having problems with
the
system.
Of course, you can set it to
boot first from your hard drive
and then
go into CMOS and change it when you
need to⎯it's
your
choice.
Most
modern CMOS lump the
Try
This!
hard drive
boot order onto a
sec-
ond
screen. This screen works
like
Working
with CMOS
an
autodetect in that it shows
only
One of
the best ways to get your
mind around the different drive
stan-
actual
hard drives attached.
This
dards
and capabilities is to run benchmarking
software on the hard
beats
the heck out of
guessing!
drive to
get a baseline of its
capabilities. Then, change
CMOS settings to
alter
the performance of the drive and run
the diagnostics again.
Try
Device
Drivers
this!
Devices
that do not get BIOS via
the
Get a
reliable hard drive benchmarking program.
I recommend
1.
system
BIOS routines naturally
re-
HD Tach
(www.simplisoftware.com) as reliable and
rugged.
quire
some other source for
BIOS.
Run the
software, and record the
scores.
2.
For
ATAPI devices and
many
Change
some or all of the following
CMOS settings, and
then
3.
SATA
controllers, the source
of
run the
benchmarking utility again:
PIO mode, DMA mode,
choice
is software device
drivers,
Block
mode.
but
both technologies have a
couple
What
were the effects of changing
settings?
4.
of
quirks you should know
about.
ATAPI
Devices and BIOS
ATAPI
drives plug into an ATA controller on
the motherboard and follow
the
same conventions on cabling and
jumpers used by PATA hard drives.
In
fact,
all current CMOS setup
utilities seem
to
autodetect CD-media ATAPI
drives.
If you go into CMOS
after
installing
a CD-ROM drive as mas-
ter on
the secondary IDE
controller,
for
example, the drive will show
up
just
fine, as in Figure
8.52.
The
reporting of
installed
CD-media
drives in CMOS serves
two
purposes. First, it tells
the tech-
nician
that he or she has good
con-
nectivity
on the ATAPI drive.
Second,
it shows that you have
the
option
to boot to CD-media, such
as
a
Windows XP disc. What it
doesn't
do,
however, is provide true
BIOS
support
for that drive! That has
to
come
with a driver loaded at
�
Figure
8.52 CMOS
screen showing a CD-ROM
drive detected
boot-up.
135
Chapter
8: Hard
Drive Technologies

Troubleshooting
Hard Drive
■
Installation
The
best friend a tech has when
it comes to troubleshooting hard drive
in-
stallation
is the autodetection feature of
the CMOS setup utility.
When a
The CompTIA A+
220-603
drive
doesn't work, the biggest
question, especially during installation,
is,
exam is
interested in trouble-
"Did I plug it in
correctly?" With autodetection,
the answer is simple; if
it
shooting
storage devices, but
doesn't
see the drives, something is
wrong with the hardware
configura-
more from
the software side
tion.
Either a device has
physically failed or, more
likely, you didn't give
the
than
the physical
installation
hard drive
power, plugged a cable in
backwards, or messed up some
other
angle.
connectivity
issue.
It takes
four things to get a drive installed and
recognized by the
system:
jumpers
(PATA only), data cable,
power, and CMOS setup
recognizing the
drive.
If any of these steps is
missed or messed up, you
have a drive that
simply
doesn't exist according to
the PC! To troubleshoot hard
drives, sim-
ply work your way
through each step to figure
out what went wrong.
First,
set the drive to master,
slave, standalone, or cable
select, depend-
ing on
where you decide to install
the drive. If a drive is alone on
the cable,
set it
to master or standalone. With two
drives, one must be master
and the
other
slave. Alternatively, you can
set both drives to cable
select and use a
cable-select
cable.
Second,
the data cable must be
connected to both the drive and
control-
ler,
Pin 1 to Pin 1. Reversing
the data cable at one
end is remarkably easy
to
do,
especially with the rounded
cables. They obviously don't
have a big red
stripe
down the side to indicate
the location of Pin 1! If you
can't autodetect
the
drive, check the
cabling.
Third,
be sure to give the hard drive power.
Most hard drives use a
stan-
dard
Molex connector. If you don't
hear the whirring of the
drive, make cer-
tain you
plugged in a Molex from the power
supply, rather than
from
another
source such as an otherwise
disconnected fan. You'd be
surprised
how
often I've seen that!
Fourth,
you need to provide BIOS for
the controller and the
drive. This
can
get tricky as the typical
CMOS setup program has a
lot of hard drive op-
tions.
Plus, you have an added
level of confusion with RAID settings
and
non-integrated
controllers that require
software drivers.
Once
you've checked the physical
connections, run through these
issues
in CMOS.
Is the controller enabled? Is
the storage technology--LBA,
INT13,
ATA/ATAPI-6--properly
set up? Similarly, can
the motherboard
support
the
type of drive you're installing? If
not, you have a couple of
options. You
can
flash the BIOS with an
upgraded BIOS from the
manufacturer or you
can
get a hard drive controller that
goes into an expansion
slot.
Finally,
make certain with non-integrated hard
drive controllers, such as
those
that come with many SATA
drives, that you've
installed the proper
drivers
for the controller. Driver issues
can crop up with new, very
large
drives,
and with changes in technology. Always
check the
manufacturer's
Web
site for new drivers.
136
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)

Beyond
A+
Spindle
(or Rotational) Speed
Hard
drives run at a set spindle
speed, measured in revolutions
per minute
(RPM).
Older drives run at the
long-standard speed of 3600
RPM, but new
drives
are hitting 15,000 RPM!
The faster the spindle
speed, the faster
the
controller
can store and retrieve data.
Here are the common
speeds: 4500,
5400,
7200, and 10,000 RPM.
Faster
drives mean better system
performance, but they can
also cause
the
computer to overheat. This is
especially true in tight
cases, such as
minitowers,
and in cases containing many
drives. Two 4500 RPM
drives
might
run forever, snugly tucked
together in your old case. But
slap a hot
new
10,000 RPM drive in that same case and
watch your system start
crash-
ing
right and left!
You can
deal with these hotrod
drives by adding drive bay
fans between
the
drives or migrating to a more
spacious case. Most
enthusiasts end up do-
ing
both. Drive bay fans sit at
the front of a bay and blow
air across the
drive.
They
range in price from $10 to
$100 (U.S.) and can lower
the temperature of
your
drives dramatically. Figure
8.53 shows a picture of a
double-fan drive
bay
cooler.
Air flow in a case
can make or break your
system
stability,
especially when you add new drives
that
increase
the ambient temperature. Hot
systems get
flaky
and lock up at odd moments. Many things
can
impede
the air flow--jumbled up
ribbon cables,
drives
squished together in a tiny
case, fans clogged
by dust
or animal hair, and so
on.
Technicians
need to be aware of the
dangers
when
adding a new hard drive to an older
system.
Get
into the habit of tying off
ribbon cables, adding
front
fans to cases when systems
lock up intermit-
tently,
and making sure the fan(s)
run well. Finally,
if a
client wants a new drive and his
system is a tiny
minitower
with only the power supply fan to
cool it
off, be
gentle, but definitely steer him to
one of the
slower
drives!
�
Figure
8.53 Bay
fans
Hybrid
Hard Drives
Windows
Vista supports hybrid hard
drives (HHDs), drives that
combine
flash
memory and spinning platters to
provide fast and reliable
storage.
Samsung
has drives with 128-MB and
256-MB flash cache, for
example, that
shave
boot times in half and,
because the platters don't
have to spin all
the
time,
add 2030 minutes more of
battery life for portable
computers. Add-
ing that
much more run time with only
a tiny price premium and no
extra
weight
is the Holy Grail of portable
computing!
137
Chapter
8: Hard
Drive Technologies
Chapter
8 Review
■ Chapter
Summary
After
reading this chapter and
completing the
geometric
values, have no relevance in
today's
exercises,
you should understand the
following about
PCs, but
most CMOS utilities still
support them.
hard drive
technologies.
ATA--The
King
How
Hard Drives Work
Today's
hard drives have either an ATA
interface
■
or a
SCSI interface. ATA drives
may be parallel
Hard
drives contain aluminum
platters coated
■
ATA
(PATA) or the newer serial
ATA (SATA).
with a
magnetic medium and read/write
heads
A
specification of the American
National
that
float on a cushion of air. Hard
drives store
Standards
Institute (ANSI), the AT
Attachment
data in
a tiny magnetic field called
a flux that
(ATA)
interface (commonly but incorrectly
referred
defines
a zero or a one. The
switching back and
to as
IDE) used a 40-pin ribbon
cable, had a built-in
forth of
the field is called flux
reversal. The
controller,
and did not require a low-level
format.
incredible
storage capacity of today's
drives is due
By 1995,
EIDE was the dominant
interface. Its
to
Partial Response Maximum
Likelihood (PRML)
features
include higher capacities,
support for
encoding
that includes intelligent
circuitry to
nonhard
drive storage devices, a four
device
analyze
each flux reversal.
maximum,
and improved throughput. The
terms
Two
different technologies have
been used to move
■
ATA,
IDE, and EIDE are used
interchangeably to
read/write
heads across the platters:
stepper
describe
all PATA devices.
motors
and voice coil. Very
susceptible to physical
deterioration
and temperature changes, the
now
PATA
drives use a 40-pin plug
and a controller that
■
obsolete
stepper motors moved the
actuator arm in
connects
them to the external data
bus. Although
fixed
increments or steps, often
resulting in data
the
real controller is built
into the hard drive
itself,
transfer
errors or the inability to
access data on a
the
40-pin connector on the
motherboard is
cold
drive. The heads had to be
parked to a
called
the controller. Most modern
motherboards
non-data
area when not in use to
prevent possible
contain
two PATA controllers, each capable
of
damage
to the disk surface. Today's
drives use a
supporting
up to two PATA devices. By looking
at
linear
or voice coil motor
consisting of a permanent
the
motherboard itself or at the
motherboard book,
magnet
surrounding a coil on the
actuator arm.
you can
determine which is the
primary controller
Electrical
current causes the coil to
generate a
and
which is the secondary. If you
are using only
magnetic
field that moves the
actuator arm and
one
controller, it should be the
primary one.
thus
the read/write heads.
Containing no data,
one
The
Advanced Technology Attachment
Packet
■
side of
one platter is used as a map to
position the
Interface
(ATAPI) enables nonhard drive
devices
heads
directly over the data.
Voice coil technology
to use a
PATA controller. ATAPI devices, such
as
automatically
parks the heads when the
drive loses
CD-ROM
drives, use the same
40-pin interface and
power.
follow
the same rules of master,
slave, and cable
select
jumper settings. Nonhard drives
must get
Disk
geometry for a particular hard drive
consists of
■
their
BIOS from option RAM or a software
driver.
three
primary values: heads,
cylinders, and
sectors
per
track. There are two
read/write heads per
Originally,
IDE drives used the same
BIOS command
■
platter.
A hard drive can have either
an even or an
set
introduced years earlier.
Maximum values of
odd
number of heads. A cylinder
defines a group of
1024
cylinders, 16 heads, and 63
sectors per track
tracks
of the same diameter. Each
track is sliced into
limited
an IDE drive's capacity to 528
million bytes
tiny
slivers called sectors, each
of which stores
(504
MB). Western Digital
developed the LBA
512
bytes of data. Disk geometry
uses the number of
sector
translation method to accommodate
larger
sectors
per track. Combining
cylinders, heads, and
EIDE
drives. LBA supports drives with up
to
sectors
per track is referred to as
CHS. Write
256
heads, for a storage capacity
limit of 8.4 GB.
precompensation
and landing zone, two
other
138
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
As drive
capacity neared the 8.4-GB
maximum,
All SCSI
devices can be divided into two
groups:
■
■
Phoenix
Technologies broke the limit
by coming up
internal
and external. Internal SCSI
devices connect
with a new set of
BIOS commands called
Interrupt
to the
host adapter with a 68-pin
ribbon cable.
13
extensions (INT13). Completely
ignoring the CHS
External
devices connect to the host
adapter with
values,
INT13 supports drives up to
137 GB by
either a
50-pin HD connector or a 68-pin
HD
reporting
a stream of "addressable sectors" to
LBA.
connector.
SCSI enables you to daisy-chain
devices
together
to form longer SCSI
chains.
As drive
capacity neared the 137-GB
limit, the
■
ANSI ATA
committee adopted ATA/ATAPI-6, a
Improper
termination or incorrect SCSI ID
settings
■
new
standard that increased the
limit to more than
are
the two most common causes
of SCSI devices
144
petabytes (144,000,000 GB). It
uses a 48-bit
not
working. The key factor
here is that you must
addressing
scheme and an enhanced block
mode
terminate
only the ends of the
SCSI chain.
that
transfers up to 65,536 sectors at a
time.
Protecting
Data with RAID
Newer hard
drives use direct memory
access
■
Drive
mirroring writes data
simultaneously to two
(DMA)
mode to send data directly
to RAM,
■
hard
drives, enabling the system
to continue to
bypassing
the CPU. Instead of using
the slow
work if
one hard drive dies. A faster and
even
DMA
controller chip, today's DMA
transfers use
more
effective technique is drive duplexing,
which
bus
mastering to transfer 32 bits of
data. Hard
performs
mirroring using separate
controllers for
drives
typically use one of the
following modes:
each
drive. A third way to create
redundant data is
Ultra
DMA mode 4 (ATA/66), Ultra DMA
mode 5
disk
striping with parity. This
technique, requiring
(ATA/100),
and Ultra DMA mode 6
(ATA/133).
at least
three drives, combines the
redundancy of
To use
Ultra DMA, you must have a
controller and
disk
mirroring with the speed of
disk striping.
an
80-wire ribbon cable. Some
motherboards
Although
disk striping without parity
works very
combine
different speeds of ATA controllers,
with
fast,
splitting the data across
two drives means
the
higher speed controller
indicated with a bright
you'll
lose all
data if
either drive fails.
color.
The 80-wire ribbon cable
indicates where the
master
and slave drives should be
connected.
Numbered
0 through 6, there are seven
official
■
High-end
PATA devices can use lower
end
levels
of RAID, but the most
commonly used ones
controllers,
but they will operate at the
slower
are RAID
0 (disk striping), RAID 1 (disk
mirroring
speed.
or
duplexing), and RAID 5 (disk striping
with
distributed
parity).
Serial
ATA (SATA) devices look
identical to
■
standard
PATA devices (except their
data and
RAID may
be implemented through hardware
or
■
power
connectors), but their thinner
seven-wire
software
methods. While software
implementation is
cables
provide better airflow and
may be up to a
cheaper,
hardware techniques provide
better
meter
(39.4 inches) long. SATA
does away with the
performance.
Windows 2000 Server and
Windows
entire
master/slave concept. Each drive
connects to
2003
Server include built-in RAID
software for
one
port, so no more daisy-chaining
drives.
RAID 0, RAID 1,
and RAID 5 for either ATA or
SCSI.
Windows
2000 and XP Professional
include Disk
SATA
devices are hot-swappable,
great for RAID
■
Management
for RAID 0. RAID software
solutions
technology.
SATA transfers data in serial
bursts,
tend to
overwork your operating system,
resulting in
for up to 30
times the throughput of
PATA. SATA
slowdowns.
Hardware RAID is invisible to the OS
and
drives
come in two common varieties,
the 1.5Gb
is
usually hot-swappable. A hardware ATA
RAID
and the
3Gb, that have a maximum
throughput of
controller
usually requires CMOS
configuration. Many
150
MBps and 300 MBps,
respectively.
motherboards
include built-in ATA-based
hardware
RAID 0
and RAID 1 capabilities.
SCSI:
Still Around
All SCSI
chains, which support either
8 or 16
SCSI
drives were a natural for
the multiple-disk
■
■
devices
including the controller,
require proper
RAID.
Specialized ATA RAID controller
cards
termination
to prevent signal echo.
Additionally,
support
ATA RAID arrays of up to 15 drives.
With
each
device on a chain requires a
unique SCSI ID,
its
hot-swap capabilities, SATA may
soon take over
which
can be set by jumpers,
switches, or dials.
lower
end RAID from SCSI.
139
Chapter
8: Hard
Drive Technologies

Connecting
Drives
autodetection
does not
provide
true BIOS support.
You must
still install drivers to
provide the BIOS. If
Older
PATA drives use a 40-wire
cable, while the
■
the
driver is installed in a graphical mode,
you will
newer
Ultra DMA drives use an
80-wire cable.
be
unable to access the drive if you
boot to a
Either
round or flat and containing no twists,
each
command
promptonly environment.
ribbon
cable supports two drives. A
diagram on
the hard
drive's housing shows how to
set its
It takes
four things to get a drive installed
and
■
jumpers
to identify it as master, slave,
standalone
recognized
by the system: jumpers, data
cable,
(on
some drives), or cable
select (cable
position
power,
and CMOS setup or providing
BIOS. If any
determines
whether the drive will be master
or
of these
steps is missed or messed
up, your drive
slave).
Two devices on one cable
must both be set
simply
doesn't exist according to
the PC.
to cable
select, and the cable itself
must also be
If the
autodetection feature of the
CMOS utility
■
cable
select, as indicated with a pinhole
through
does
not detect a drive, it means
it is installed
one
wire. Align the colored
stripe on the cable
with
incorrectly
or the drive itself is bad.
Check the
pin 1 on
the controller and the
drive. Use a Molex
master/slave
jumper settings. Make sure
that the
connector
to provide power to the
drive.
ribbon
cable aligns pin 1 with pin 1, and that
the
SATA
supports only a single
device per controller
Molex
connector is supplying power to the
drive.
■
channel,
so there are no master,
slave, or cable
Once
you've checked the physical
connections, run
■
select
jumpers. SATA controller and power
cables
through
these issues in CMOS. Is the
controller
are
keyed to prevent incorrect
insertion. You can
enabled?
Is the storage technology--LBA,
Large,
connect
a PATA device to a SATA
motherboard
INT13,
ATA/ATAPI-6--properly set up?
What
controller
by way of a SATA bridge.
about
the data transfer settings
for PIO and DMA
modes?
Similarly, can the
motherboard support
the
BIOS
Support: Configuring CMOS
type of
drive you're installing? If not, you
can flash
and
Installing Drivers
the
BIOS or get a hard drive controller
that goes
While
system BIOS supports
built-in PATA
■
into an
expansion slot. Make certain
with
controllers,
hard drives require configuration
in
non-integrated
hard drive controllers, such as
CMOS.
ATAPI devices require software
drivers to
those
that come with many SATA
drives, that
provide
BIOS support. Built-in SATA
controllers
you've
installed the proper drivers
for the
on a
motherboard also require
software drivers, as
controller.
Always check the
manufacturer's Web
does a
SATA controller on a separate
expansion
site for
new drivers.
card.
All SATA devices get BIOS
support from the
SATA
controller, but some drives
require
Troubleshooting
Hard Drive Installation
additional
configuration; in particular, with
RAID
It takes
four things to get a drive installed
and
■
systems,
you may also have to
configure the
recognized
by the system: jumpers (PATA
only),
controller
Flash ROM settings for the
specific
data
cable, power, and CMOS setup
recognizing
drive(s)
you install.
the
drive. If any of these steps
is missed or messed
When
the hard drive type is set to
"Auto," PATA
up, you
have a drive that simply
doesn't exist
■
devices
can be queried directly by
BIOS routines,
according
to the PC! To troubleshoot hard
drives,
resulting
in the correct CMOS settings
for up to
simply
work your way through each step to
figure
four ATA
devices. Autodetection made hard
drive
out what
went wrong.
types
obsolete. Because PATA drives
have CHS
Once
you've checked the physical
connections, run
■
values
stored inside them, the
BIOS routine, when
through
these issues in CMOS. Is the
controller
set to
"Auto," updates the CMOS
each time the
enabled?
Is the storage technology--LBA,
INT13,
computer
boots. An alternative is to run
the
ATA/ATAPI-6--properly
set up? Similarly,
can
autodetection
option from the CMOS
screen.
the
motherboard support the type
of drive you're
Even if
the autodetect feature
indicates that an
installing?
If not, you have a couple of
options. You
■
optical
ATAPI drive has been installed,
this merely
can
flash the BIOS with an
upgraded BIOS from
shows
that the drive is connected
properly and has
the
manufacturer or you can get a hard
drive
the
option to function as a boot
device. This
controller
that goes into an expansion
slot.
140
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
■ Key
Terms
40-pin
ribbon cable (109)
geometry
(105)
SCSI
chain (120)
80-wire
cable (116)
heads
(105)
SCSI ID
(122)
Advanced
Technology Attachment
integrated
drive electronics
sector
(106)
Packet
Interface (ATAPI) (114)
(IDE)
(108)
sector
translation (113)
ATA/133
(118)
Interrupt
13 (INT13)
sectors
per track (107)
extensions
(116)
ATA/ATAPI-6
or simply
Self-Monitoring,
Analysis, and
ATA-6
(117)
logical
block addressing
Reporting
Technology
(LBA)
(112)
cylinder
(106)
(S.M.A.R.T.)
(115)
PIO
modes (111)
disk
duplexing (124)
serial
ATA (SATA) (108)
parallel
ATA (PATA) (108)
disk
mirroring (124)
small
computer system
interface
(SCSI)
(120)
Partial
Response Maximum
disk
striping (124)
Likelihood
(PRML) (103)
stepper
motor (104)
disk
striping with parity (126)
redundant
array of independent
termination
(123)
DMA
modes (111)
(or
inexpensive) disks
track
(106)
Enhanced
IDE (EIDE) (111)
(RAID)
(126)
Ultra
DMA (116)
External
SATA (eSATA) (120)
SATA
bridge (119)
voice
coil (104)
■ Key
Term Quiz
Use
the Key Terms list to
complete the sentences
that
5. Seen in
RAID 5, ____________ uses at least
three
follow.
Not all terms will be
used.
drives
and combines the best
features of disk
mirroring
and disk striping.
1. An ATA hard drive
connects to the
controller
6. A(n)
____________-compliant CD-ROM drive
with
a(n) ____________ while an
Ultra DMA
installs
and cables just like an EIDE
drive.
drive
uses a(n)
____________.
7. The ANSI
ATA committee adopted
the
2. A(n)
____________ is composed of a group
of
____________
standard, called "Big
Drives" by
tracks
of the same diameter that
the read/write
Maxtor,
that allows drives with more
than 144
heads
can access without
moving.
petabytes.
3. To
install a parallel ATA device to a
serial ATA
8. ____________
drives transfer data at 133
MBps.
controller,
use a tiny card called
a(n)
9. Drives
that use ____________ bypass
the CPU
____________.
and send
data directly to
memory.
4. LBA,
developed by Western Digital,
uses
10.
____________
devices require termination at
both
____________
to get around the limits of
1024
ends of
a chain.
cylinders,
16 heads, and 63 sectors/track.
■ Multiple-Choice
Quiz
1. Which of
the following is NOT used to
compute
2. Which
level of RAID is disk striping
with
storage
capacity in CHS disk
geometry?
distributed
parity?
A. Sectors
per track
A. RAID
0
B. Tracks
B. RAID
1
C. Heads
C. RAID
5
D. Cylinders
D. RAID
6
141
Chapter
8: Hard
Drive Technologies

A. IDE
3. Which of
the following is the most
efficient
encoding
method?
B. EIDE
A. Partial
Response Maximum Likelihood
(PRML)
C. SCSI
B. Frequency
modulation (FM)
D. ATA
C. Run
length limited (RLL)
9. Shelby
wants to add a new 100-GB hard drive
to
her
computer. Which of the
following will allow
D. Modified
frequency modulation (MFM)
her to
do so?
4. Counting
both channels, what is the
maximum
A. CHS
number
of drives/devices that EIDE
can
support?
B. LBA
A. One
C. ECHS
B. Two
D. INT13
C. Seven
10.
Which of
the following techniques
provides
redundancy
by using two disks and two
D. Four
controllers?
5. Which of
the following is NOT true
about cable
A. Drive
mirroring
select?
B. Drive
duplexing
A. Both
drives/devices should be set for
cable
select.
C. Disk
striping
B. It
requires a special cable with a
pinhole
D. Disk
striping with parity
through
one wire.
11.
How
many wires does an Ultra DMA
cable
C. The
colored stripe on the ribbon
cable should
have?
align
with pin 1 on the controller and
drive.
A. 24
D. Position
of the drives on the cable
does not
B. 34
matter.
C. 40
6. If you
install two IDE drives on the
same cable,
D. 80
how will
the computer differentiate
them?
12.
Billy
just installed a second hard
drive, but the
A. The
CMOS setup allows you to
configure
autodetection
utility in CMOS does not
detect it.
them.
Sara
told him he probably had the
jumpers set
B. You must
set jumpers to determine
which
incorrectly
or had forgotten to connect the
Molex
drive
functions as master and
which
power
connector. John told him his
new hard
functions
as slave.
drive is
probably bad and he should
return it. Is
C. You will
set jumpers so each drive will
have a
Sara or
John probably
correct?
unique
ID number.
A. Sara is
correct.
D. The
drives will be differentiated by
whether
B. John is
correct.
you
place them before or after
the twist in the
C. Neither
is correct.
ribbon
cable.
D. Either
John or Sara may be
correct.
7. What
was the maximum hard drive
size allowed
13.
Which of
the following is NOT an advantage
of
by BIOS
routines for the original AT
command
serial
ATA (SATA)?
set?
A. It is
hot-swappable.
A. 528
MB
B. Thinner
cables provide better
airflow inside
B. 1024
MB
the
case.
C. 504
MB
C. SATA
provides faster data
throughput than
D. 1028
MB
PATA.
8. Which of
the following terms does NOT
describe
D. SATA
cable must be shorter than
PATA
parallel
ATA devices?
cables.
142
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, & 220-604)
14.
Which of
the following two CMOS
configuration
15.
What
standard did the ANSI ATA
committee
options
are obsolete with today's hard
drives?
adopt
that increased disk storage
capacity to
more
than 144 petabytes?
A. Cylinders
and heads
A. ATA/ATAPI-6
B. Heads
and sectors
B. LBA
C. Sectors
and write precompensation
C. INT13
D. Write
precompensation and landing
zone
D. ECHS
■ Essay
Quiz
1. Discuss
at least three advantages of
serial ATA
features
including storage capacity,
interface,
over
parallel ATA.
RPM, and
cost:
2. Compare
and contrast hardware and
software
Maxtor
Model # 6Y120L0 and Maxtor
Model
■
RAID
implementation.
#
6Y120M0
3. Your
friend Blaine has a Pentium
III computer
Western
Digital Model # WD1200JB
and
■
with a
100-MHz bus. Currently, it
has only a
Western
Digital Model #
WD1200JD
20-GB
ATA/100 hard drive and a CD-RW
drive.
Since
he's interested in graphics, he
knows he
5. Hard
drives include other
features and
needs
more storage capacity and
wants to add a
characteristics
not included in this
chapter.
second
hard drive. What advice will you
give
Choose
one of the following topics
and use the
him
about selecting a new hard
drive?
Internet
to define and explain it to the
class.
4. Use
www.google.com or a site such
as
Zone
bit recording
■
www.newegg.com
to compare one of the
"Pixie
dust" hard drives
■
following
pairs of hard drives to determine
their
Lab
Projects
� Lab
Project 8.1
Access
the CMOS setup for your
computer and
utility
and run it. Does it offer
different modes with
examine
the settings that apply to
your hard drive(s)
different
drive capacities? Try to find a screen
that
and EIDE
interface. In particular, look at
the initial
includes
PIO modes and examine this
setting. What
screen
to see if it is set to autodetect
the kind of hard
other
screens apply to the hard
drive? When you
drive.
Is the mode set to LBA or
something else?
finish,
be sure to choose Quit
without Saving.
Now find
the screen that includes
the autodetect
� Lab
Project 8.2
Visit
your local computer store or
use the Internet to
parallel
ATA interfaces or if they offer
serial ATA
discover
what kinds of hard drives
and hard drive
interfaces,
either onboard or through an
expansion
interfaces
are commonly offered with a new
computer.
card. If
you were purchasing a new
computer, would
Try to
determine whether the
motherboards offer
only
you
select PATA or SATA? Why?
143
Chapter
8: Hard
Drive Technologies
� Lab
Project 8.3
Your
supervisor has decided to
implement RAID on
security
of data at the lowest cost
possible, and the
the old
company server machine,
where everyone
other
that maximizes speed but
retains some
stores
their work-related data.
Come up with two
security.
Cost is not a factor for the
second RAID
competing
RAID setups, one that
maximizes
plan.
� Lab
Project 8.4
If your
lab has the equipment,
install a second hard
detected.
Boot into your operating
system and verify
drive in your
system. Install it on the
same cable as
that
both drives are accessible.
(You may need to
the
existing drive and jumper it as the
slave. (You
partition
and format the second drive
before it is
may
need to jumper the existing
drive as master.)
actually
usable.)
Reboot,
enter CMOS, and verify both
drives are
144
Mike
Meyers' CompTIA A+ Guide: PC
Technician (Exams 220-602,
220-603, &
220-604)
Table of Contents:
- Computer Architecture, Organization and Design
- Foundations of Computer Architecture, RISC and CISC
- Measures of Performance SRC Features and Instruction Formats
- ISA, Instruction Formats, Coding and Hand Assembly
- Reverse Assembly, SRC in the form of RTL
- RTL to Describe the SRC, Register Transfer using Digital Logic Circuits
- Thinking Process for ISA Design
- Introduction to the ISA of the FALCON-A and Examples
- Behavioral Register Transfer Language for FALCON-A, The EAGLE
- The FALCON-E, Instruction Set Architecture Comparison
- CISC microprocessor:The Motorola MC68000, RISC Architecture:The SPARC
- Design Process, Uni-Bus implementation for the SRC, Structural RTL for the SRC instructions
- Structural RTL Description of the SRC and FALCON-A
- External FALCON-A CPU Interface
- Logic Design for the Uni-bus SRC, Control Signals Generation in SRC
- Control Unit, 2-Bus Implementation of the SRC Data Path
- 3-bus implementation for the SRC, Machine Exceptions, Reset
- SRC Exception Processing Mechanism, Pipelining, Pipeline Design
- Adapting SRC instructions for Pipelined, Control Signals
- SRC, RTL, Data Dependence Distance, Forwarding, Compiler Solution to Hazards
- Data Forwarding Hardware, Superscalar, VLIW Architecture
- Microprogramming, General Microcoded Controller, Horizontal and Vertical Schemes
- I/O Subsystems, Components, Memory Mapped vs Isolated, Serial and Parallel Transfers
- Designing Parallel Input Output Ports, SAD, NUXI, Address Decoder , Delay Interval
- Designing a Parallel Input Port, Memory Mapped Input Output Ports, wrap around, Data Bus Multiplexing
- Programmed Input Output for FALCON-A and SRC
- Programmed Input Output Driver for SRC, Input Output
- Comparison of Interrupt driven Input Output and Polling
- Preparing source files for FALSIM, FALCON-A assembly language techniques
- Nested Interrupts, Interrupt Mask, DMA
- Direct Memory Access - DMA
- Semiconductor Memory vs Hard Disk, Mechanical Delays and Flash Memory
- Hard Drive Technologies
- Arithmetic Logic Shift Unit - ALSU, Radix Conversion, Fixed Point Numbers
- Overflow, Implementations of the adder, Unsigned and Signed Multiplication
- NxN Crossbar Design for Barrel Rotator, IEEE Floating-Point, Addition, Subtraction, Multiplication, Division
- CPU to Memory Interface, Static RAM, One two Dimensional Memory Cells, Matrix and Tree Decoders
- Memory Modules, Read Only Memory, ROM, Cache
- Cache Organization and Functions, Cache Controller Logic, Cache Strategies
- Virtual Memory Organization
- DRAM, Pipelining, Pre-charging and Parallelism, Hit Rate and Miss Rate, Access Time, Cache
- Performance of I/O Subsystems, Server Utilization, Asynchronous I/O and operating system
- Difference between distributed computing and computer networks
- Physical Media, Shared Medium, Switched Medium, Network Topologies, Seven-layer OSI Model